
- ПОЛЕЗНО Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
- Alsan
- Alsan
- Управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988
- Необходимые компоненты
- Шаговый двигатель NEMA17
- Число шагов за оборот для двигателя NEMA17
- Технические характеристики двигателя Nema 17
- Модуль драйвера шагового двигателя A4988
- Различия между драйверами двигателя DRV8825 и A4988
- Схема проекта
- Объяснение программы для Arduino
ПОЛЕЗНО Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
Alsan
Alsan
МЕСТНЫЙ СТАРОЖИЛА
На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17. 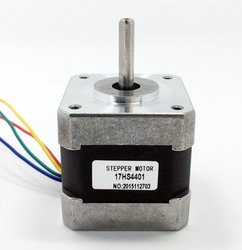
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) — в архиве: Nema17 — (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета. 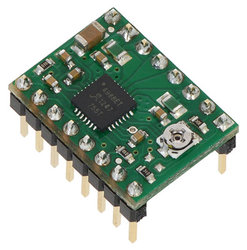
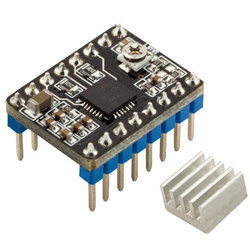

Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
Характеристики А4988
Напряжения питания логической части: 3-5,5 В
Напряжения питания силовой части: 8-35 В
Максимальный ток без дополнительного охлаждения: 1 А
Максимальный ток с дополнительным охлаждением: 2 А
Дробление шага: 1, 1/2, 1/4, 1/8, 1/16
Защита от перегрузок и перегрева
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET — cброс микросхемы
STEP — генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! — Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
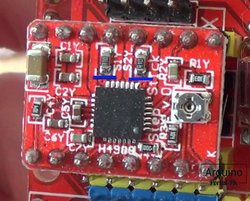
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал — 0.05 Ом) или R100 (номинал — 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 — биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
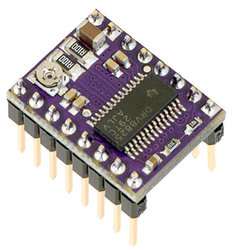
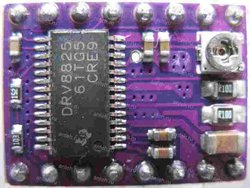
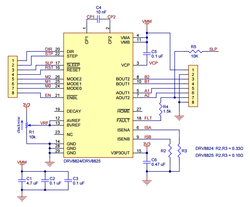
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на «среднем контакте резистора») из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей. 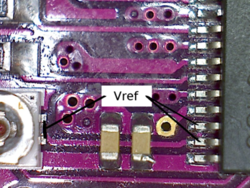
Режим микрошага устанавливается путем подачи «1» на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
«По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер.»
Источник
Управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988
Шаговые двигатели – это разновидность двигателей постоянного тока, в которых перемещение ротора происходит небольшими дискретными шагами. В настоящее время шаговые двигатели находят очень широкое применение – начиная от камер наблюдения и заканчивая сложными роботами и механизмами.

Чтобы лучше понять материал данной статьи целесообразно посмотреть статью об управлении шаговым двигателем 28-BYJ48 с помощью Arduino и потенциометра. Однако шаговый двигатель 28-BYJ48 имеет значительно меньший крутящий момент, чем более мощные двигатели такие как, например, NEMA 14, NEMA17.
В данной статье мы рассмотрим управление шаговым двигателем NEMA 17 с помощью платы Arduino и драйвера двигателя A4988. Для управления направлением вращения шагового двигателя мы будем использовать потенциометр. Ранее на нашем сайте мы также рассматривали управление шаговым двигателем NEMA 17 с помощью Arduino и драйвера DRV8825.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Шаговый двигатель NEMA 17 (купить на AliExpress).
- A4988 Stepper Driver Module (модуль драйвера шагового двигателя) (купить на AliExpress).
- Конденсатор 47 мкФ (купить на AliExpress).
- Потенциометр (купить на AliExpress).
Шаговый двигатель NEMA17
Принцип действия шагового двигателя Nema17 аналогичен работе других шаговых двигателей. Более подробно о принципах работы шаговых двигателей можно прочитать в статье про подключение шагового двигателя к микроконтроллеру AVR.

Шаговый двигатель NEMA 17 имеет плиту размером 1.7 x 1.7 дюйма и он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1.8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на следующем рисунке.

Как вы можете видеть из представленного рисунка, шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17
Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1.8 градуса, соответственно, получаем:
Steps per Revolution = 360/ step angle
360/1.8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17
- рабочее напряжение: 12V DC (12 В постоянного тока);
- угол за один шаг (Step Angle): 1.8 градуса;
- 200 шагов за один полный оборот;
- число фаз: 4;
- длина двигателя: 1.54 дюйма;
- диапазон рабочих температур: от -10 до 40 °C;
- удерживающий крутящий момент: 22.2 oz-in.
Также на нашем сайте вы можете посмотреть все проекты, в которых были использованы шаговые двигатели.
Модуль драйвера шагового двигателя A4988
Модуль драйвера шагового двигателя управляет работой шагового двигателя, подавая на него различные фазы питания в необходимые моменты времени.
Модуль драйвера шагового двигателя A4988 предназначен для управления работой шагового двигателя Nema 17 и другими аналогичными биполярными (двухполюсными) шаговыми двигателями. Этот модуль имеет встроенный транслятор (преобразователь), что позволяет ему управлять и скоростью, и направлением вращения шаговых двигателей, используя для этого небольшое число контактов.

Для управления шаговым двигателем Nema 17 нам понадобится всего два контакта модуля A4988 – STEP (для управления шагами) и DIRECTION (для управления направлением вращения двигателя).
Драйвер двигателя A4988 может управлять работой шагового двигателя в 5 различных режимах: полного шага, половины шага, четверти шага, 1/8 шага и 1/16 шага. Вы можете выбрать необходимый вам режим шага используя контакты выбора режима (MS1, MS2 и MS3). На следующем рисунке представлена таблица задействования этих контактов для выбора необходимого режима шага.

Технические характеристики драйвера двигателя A4988:
- максимальное рабочее напряжение: 35V;
- минимальное рабочее напряжение: 8V;
- максимальный ток на одну фазу: 2A;
- режимы: полный шаг, ½ шага, ¼ шага, 1/8 шага и 1/16 шага;
- защита от обратного напряжения: нет;
- размеры: .5 × 20.5 mm (0.6″ × 0.8″).
Различия между драйверами двигателя DRV8825 и A4988
Оба этих драйвера двигателя предназначены для управления шаговым двигателем Nema 17, имеют похожую распиновку и области применения, но они отличаются в количестве микрошагов, рабочем напряжении и т.д. Ниже приведены следующие ключевые отличия этих модулей драйвера двигателя:
- модуль DRV8825 поддерживает 6 режимов шага, а модуль A4988 – только 5. Большее число этих режимов означает более равномерное и тихое функционирование шагового двигателя;
- минимальная длительность шага для DRV8825 составляет 1.9 мкс, а для A4988 – 1 мкс;
- без дополнительного охлаждения DRV8825 обеспечивает немного больший ток чем A4988;
- местоположение потенциометра, регулирующего лимит тока, в обоих модулях различно;
- DRV8825 может быть использован при более высоком напряжении питания;
- на контакте спящего режима (SLEEP pin) в DRV8825 по умолчанию не установлен режим с подтягивающим резистором как это сделано в A4988;
- вместо контакта напряжения питания DRV8825 имеет выходной контакт.
Схема проекта
Схема управления шаговым двигателем NEMA 17 с помощью Arduino и драйвера A4988 представлена на следующем рисунке.

Поскольку модуль драйвера A4988 имеет встроенный транслятор (преобразователь), поэтому к плате Arduino достаточно подсоединить только его контакты Step и Direction. Контакт Step используется для управления шагами двигателями, а контакт Direction – для управления направлением его вращения. Шаговый двигатель запитывается от источника питания 12V, а модуль A4988 – от платы Arduino. Потенциометр используется для управления направлением вращения двигателя.
Если вы будете поворачивать потенциометр по часовой стрелке, то и шаговый двигатель будет вращаться по часовой стрелке. Если вы будете поворачивать потенциометр против часовой стрелки, то и шаговый двигатель будет вращаться против часовой стрелки. Конденсатор 47 мкФ используется для защиты платы Arduino от выбросов напряжения. Контакты MS1, MS2 и MS3 остаются неподключенными, что означает что драйвер будет функционировать в режиме полного шага.
Внешний вид собранной конструкции проекта показан на следующем рисунке.

Таблица соединений платы Arduino, шагового двигателя Nema 17 и модуля драйвера двигателя A4988 выглядит следующим образом.
| Контакт A4988 | Соединение |
| VMOT | +ve Of Battery |
| GND | -ve of Battery |
| VDD | 5V of Arduino |
| GND | GND of Arduino |
| STP | Pin 3 of Arduino |
| DIR | Pin 2 of Arduino |
| 1A, 1B, 2A, 2B | шаговый двигатель |
Соблюдайте полярность источника питания.
Объяснение программы для Arduino
Полный код программы и видео с демонстрацией работы схемы приведены в конце статьи, здесь же мы кратко рассмотрим основные фрагменты кода.
Первым делом скачайте библиотеку для управления шаговым двигателем по следующей ссылке и добавьте ее в Arduino IDE. После этого подключите заголовочный файл этой библиотеки в программе и укажите число шагов для шагового двигателя NEMA 17 – оно равно 200.
Источник