
Avr измерение напряжения исходники assembler

Биты 7:6 (REFS1:REFS0) — биты выбора опорного напряжения. Если мы будем менять эти биты во время преобразования, то изменения вступят в силу только после текущего преобразования. В качестве опорного напряжения может быть выбран AVcc (напряжение источника питания), AREF или внутренний источник опорного напряжения 2.56В.
Биты 7:6
REFS1:REFS0
00 AREF
01 AVcc, с внешним конденсатором на AREF
10 Резерв
11 Внутренний 2.56В источник, с внешним конденсатором на AREF
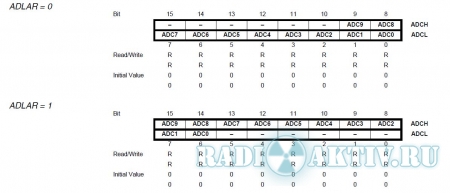
Бит 5 – ADLAR. Определяет как результат запишется в регистры
Биты 3:0 – MUX3:MUX0 – Биты выбора канала.
MUX3:0
0000 ADC0
0001 ADC1
0010 ADC2
0011 ADC3
0100 ADC4
0101 ADC5
0110 ADC6
0111 ADC7
Следующий регистр – ADCSRA где хранятся главные настройки АЦП

Бит 7 – ADEN. Разрешение АЦП.
0 – АЦП выключен
1 – АЦП включен
Бит 6 – ADSC. Запуск преобразования (в режиме однократного преобразования)
0 – преобразование завершено
1 – начать преобразование
Бит 5 – ADFR. Выбор режима работы АЦП
0 – режим однократного преобразования
1 – режим непрерывного преобразования
Бит 4 – ADIF. Флаг прерывания от АЦП. Бит устанавливается, когда преобразование закончено.
Бит 3 – ADIE. Разрешение прерывания от АЦП
0 – прерывание запрещено
1 – прерывание разрешено
Прерывание от АЦП генерируется (если разрешено) по завершении преобразования.
Биты 2:1 – ADPS2:ADPS0. Тактовая частота АЦП, а точнее делитель тактовой частоты МПС
ADPS2:0
000 2
001 2
010 4
011 8
100 16
101 32
110 64
111 128
Чем больше частота — тем быстрее преобразование, но больше погрешность.
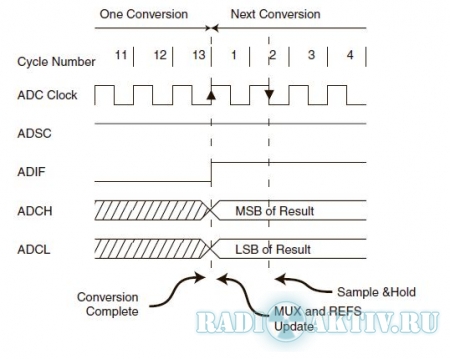
Вот так происходит преобразование
Ну и в качестве примера сделаем вольтметр на 10В.
Расчетная часть будет выглядеть так:
Будем использовать старший байт ADCH поэтому количество измерений будет 2 8 =255. Опорное напряжение – внутренний источник на 2.56В. Далее рассчитываем шаг 2.56/255=1мВ. Для того что бы измерить наши 10В нужно поставить делитель напряжения, несложными расчетами подбираем наиболее правдоподобные резисторы на 56КОм и 15КОм, тогда наш коэффициент равен 4.73. Окончательная формула выглядит так
Значение в Вольтах = ADCH*0.01*4.73;
Имеется погрешность в одну десятую т.к. делитель подобран не идеально (если кто то захочет собрать схему можно поставить подстроечник). Только не забывайте ставить емкостно-индуктивный фильтр.
Теперь программная часть:
Как всегда создаем проект в кодвижине (CodeVision) удаляем все и пишем:
Дерзайте!
Хотите подробнее – читайте даташит, ну или бегите на форум.
Источник
Примеры на Ассемблере для микроконтроллеров Atmel AVR
Здесь представлены примеры различных программ на языке Ассемблера для микроконтроллеров Atmel AVR. Примеры выложены в виде проектов для AVR Studio под микроконтроллер ATmega16, поэтому при переносе на другие МК семейства AVR это нужно учитывать. Тактовая частота микроконтроллера во всех примерах 8 МГц (используется тактирование от внутреннего генератора). Код примеров разбит на блоки и снабжен комментариями. При обнаружении ошибок просьба сообщить на почту.
Краткое описание команд Ассемблера AVR представлено здесь.
Подробное описание каждой команды представлено в AVR 8bit Instruction Set.
Для более глубокого изучения ассемблера AVR советую к прочтению книгу Юрия Ревича «Практическое программирование микроконтроллеров Atmel AVR на языке ассемблера» . С беcплатным фрагментом книги можно ознакомиться здесь. Также можно изучить различные методические пособия ВУЗов, например, вот.
Start – Заготовка стартовой инициализации микроконтроллера, в которую входят инициализация стека, очистка ОЗУ (SRAM) и регистров общего назначения (R0 — R31), а также глобальный запрет прерываний. Пример кода приведён ниже. При использовании следует помнить, что регистры ввода-вывода (порты, периферия и т.д.) не очищаются, поэтому их НЕОБХОДИМО инициализировать отдельно.
Delays – Библиотека с подпрограммами задержки. Все задержки рассчитаны на тактовую частоту МК 8 МГц. Библиотека включает следующие процедуры:
- Delay1us – Задержка повышенной точности в 1 мкс c учетом длительности RCALL и RET.
- Delay5us – Задержка повышенной точности в 5 мкс c учетом длительности RCALL и RET.
- Delay10us – Задержка повышенной точности в 10 мкс c учетом длительности RCALL и RET.
- Delayus – Задержка высокой точности в несколько десятков микросекунд.
- Delayms – Задержка высокой точности в несколько миллисекунд.
Math – Библиотека с подпрограммами математических операций, включает следующие процедуры:
- SUB16X16 – Вычитание 16-разрядных чисел.
- ADD16X16 – Сложение 16-разрядных чисел.
- MUL16X16s – Знаковое умножение 16-разрядных чисел.
- MUL16X16u – Беззнаковое умножение 16-разрядных чисел.
- DIV16X16s – Знаковое деление 16-разрядных чисел.
- DIV16X16u – Беззнаковое деление 16-разрядных чисел.
- DIV16POWER2s – Знаковое деление 16-разрядного числа на степень 2.
- DIV16POWER2u – Беззнаковое деление 16-разрядного числа на степень 2.
- SIGN16 – Смена знака 16-разрядного числа.
- DEC2BCD – Перевол 8-разрядного десятичного числа в двоично-десятичное (BCD).
- BCD2DEC – Перевол 8-разрядного двоично-десятичного (BCD) числа в десятичное.
- CP16X16 – Сравнение 16-разрядных чисел.
- DIGITS8 – Вычисление цифр 8-разрядного числа.
- DIGITS16 – Вычисление цифр 16-разрядного числа.
IO Ports – В данном примере рассматривается работа с портами ввода-вывода. К порту А подключены 8 светодиодов (линии 0-7). К линии 0 порта С подключена кнопка, с подтяжкой на землю. При нажатии кнопка выдает на линию 0 порта С уровень логической единицы. Цикл программы организован следующим образом: при запуске включается бегущий огонь, сначала загорается светодиод на линии 0 порта А, затем на линии 1 и т.д. По достижении линии 7 направление бегущего огня меняется (от 7 к 0). При нажатии на кнопку бегущий огонь останавливается и загораются одновременно все светодиоды. После повторного нажатия на кнопку бегущий огонь продолжает перемещаться с места остановки.
Dynamic Indication – В данном примере рассматривается работа с 7-сегментным индикатором. В моём случае он имеет 4 разряда (цифры). Поскольку у меня на плате установлены транзисторы для управления разрядами, то управление осуществляется выводом логической единицы и на разряды и на сегменты. Схема подключения следующая: к линиям 0-7 порта C подключены сегменты индикатора, а к линиям 0-3 порта В разряды индикатора. При запуске на индикатор выводятся цифры 1 2 3 4.
UART – В данном примере рассматривается периферийного модуля UART (универсальный асинхронный приёмопередатчик). Модуль UART можно настроить как на работу с прерываниями, так и без них (вручную, путём работы с флагами). Пример работает следующим образом: при получении байта, МК переходит в обработчик прерывания (используется только прерывание по приёму данных) и разбирает численное значение байта (0-255) на цифры, которые и выводятся на 7-сегментный индикатор. Схема подключения аналогична предыдущему примеру. Передача осуществляется по двум линиям UART (порт D линии 0-1), к которым необходимо подключить линии RX и TX преобразователя USB-UART. Для настройкки без прерываний необходимо обнулить бит RXCIE в регистре UCSRB и вручную опрашивать интерфейс в основном цикле программы.
Clock – В данном примере рассматривается реализация простых часов с 7-сегментым индикатором и парой кнопок. Только здесь уже требуется 6 разрядов, хотя секунды можно опустить. Кнопки с подтяжкой на землю. При нажатии кнопка выдает на линию высокий логический уровень. Индикатор подключается как и в предыдущих примерах (сегменты к порту C, разряды к порту B), а кнопки к линиям 2-3 порта D. Кнопка PD2 используется для установки минут, а PD3 для установки часов. По нажатию каждой из кнопок увеличивается значение соответствующего разряда (минуты или часы).
DS18B20 – В данном примере рассматривается работа с цифровым датчиком температуры DS18B20. Показания температуры выводятся на 7-сегментый индикатор. Вывод DQ датчика поключен к линии PC7. Линия должна быть подтянута к плюсу питания резистором на 4.7-10 кОм (согласно документации). Датчик опрашивается каждую секунду. Температура выводится на 4-разрядный индикатор: знак, два разряда на целуюю часть и один на вещественную. Документация к датчику здесь.
ADC Indication – Данный пример аналогичен примеру с UART. Отличие в том, что байт берется с линии 0 порта А (линия 0 АЦП, ADC0). Микроконтроллер по таймеру производит аналого-цифровое преобразование напряжения на линии 0 порта А, (младшие 2 бита отбрасываются как шум). При измерении используется внутренняя опора 5 В. К линии PD2 порта D подключена кнопка, которая определяет режим вывода показаний. При нажатии на кнопку выводится результат измерений в виде числа от 0 до 255. Если кнопка не нажата, то результат измерений переводится в вольты и выводится на индикатор (с точностью до десятых).
Fast PWM – В данном примере показана настройка аппаратного ШИМ (широтно-импульсная модуляция, англ. PWM). К линиям 4 и 5 порта D подключены светодиоды, а к линиям 0-3 порта С – кнопки. Кнопки с подтяжкой на землю (при нажатии кнопка выдает на линию порта уровень логической единицы) подключены к линиям 2-5 порта C. Кнопки на линях 2 и 3 соответственно увеличивают и уменьшают коэффициент заполнения ШИМ (меняется яркость светодиода) канала А. Кнопки на линях 4 и 5 соответственно увеличивают и уменьшают коэффициент заполнения ШИМ канала B. Число сравнения для каждого из каналов меняется в диапазоне от 0 до 255. Для канала А шаг изменения равен 10, для канала В шаг равен 5.
HCSR04 – В данном примере рассматривается работа с ультразвуковым датчиком расстояния HCSR04. К линии PD6 подключен вывод Trigger датчика, а к линии PD7 вывод Echo. Поключение 7-сегментного индикатора аналогично предыдущим примерам. По таймеру микроконтроллер раз в секунду опрашивает датчик и определяет расстояние до препятсвия в миллиметрах. После этого число разбивается на цифры и выводится на дисплей. Документация к датчику здесь.
Matrix Keyboard – В данном примере показана работа с матричной клавиатурой. Микроконтроллер динамически опрашивает клавиатуру, а затем определяет номер нажатой клавиатуры. Размер поля 3 на 3 – получаем 9 кнопок. Нажатие первых 8-ми приводит к зажиганию светодиода на соответствующей линии порта А, нажатие 9-ой кнопки зажигает все светодиоды порта А. Матричная клавиатура подключается к линиям 0-5 порта С (три столбца и три строки). В архиве схема и печатная плата матричной клавиатуры (Diptrace).
Shift Register – В данном примере рассматривается работа с модулем SPI на примере сдвигового регистра 74HC595. К регистру подключены светодиоды, в качестве линии CS используется линия 4 порта B (вывод not SS). Линия DS (14 нога) регистра идет к MOSI (PB5), линия SHCP (11 нога) к линии SCK (PB7), линия STCP (12 нога) к линии SS (PB4). Линии MR (10 нога) и OE (13 нога) должны быть подтянуты к высокому и низкому логическим уровням соответственно. По таймеру микроконтроллер меняет состояние светодиодов: поочерёдно горят то чётные светодиоды, то нечётные. Если при этом передать байт по UART’у, то он будет выведен в порт на светодиоды. Чтобы обратно переключиться в режим мигания необходимо послать по UART’у 0x00 (ноль). Документация к микросхеме 74HC595 здесь.
SG-90 Servo – В данном примере рассматривается работа с сервоприводом SG-90. Используется аппаратный ШИМ. Линия ШИМ сервпопривода подключена к каналу А аппаратного ШИМ. Кнопки поворота подключены к линиям PD2 и PD3. Кнопка на линии PD2 увеличивает длительность импульса, кнопка на линии PD3 уменьшает длительность импульса. Длительность импульса меняется от 1 до 2 мс. Описание сервомотора здесь.
RGB Lamp – В данном примере рассматривается работа с трехцветным RGB-светодиодом. Реализовано плавное переливание цветов с использованием программного ШИМ. Линии красного, зеленого и синего цветов подключаются соответственно к линиям 2, 3 и 4 порта D.
Источник
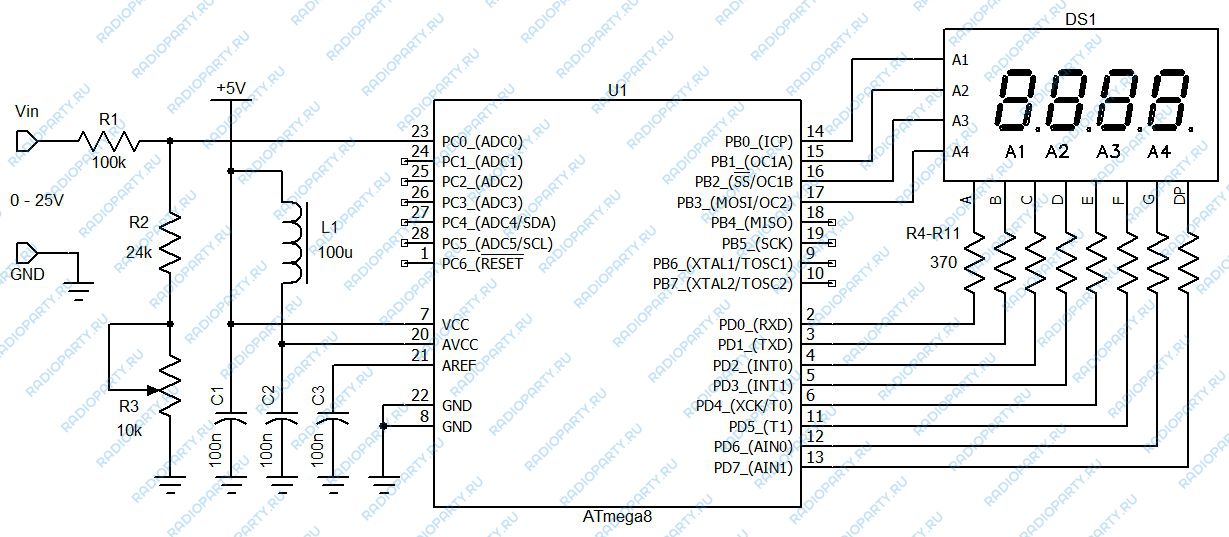
АЦП микроконтроллеров AVR. Делаем цифровой вольтметр 0 — 25V
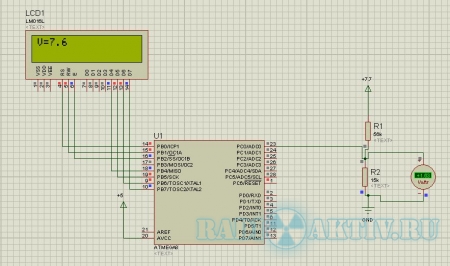
Продолжим изучать аналого-цифровой преобразователь микроконтроллеров AVR на примере цифрового вольтметра постоянного напряжения, с пределами измерения от 0 до 25V. Измеряемое напряжение будет отображаться на четырехразрядном семисегментном индикаторе с общим анодом. В этом примере применим динамическую индикацию о которой подробней рассказано на одном из предыдущих занятий, кусок кода возьмем от туда же. Микроконтроллер Atmega8 тактируется от внутреннего генератора частотой 8MHz.
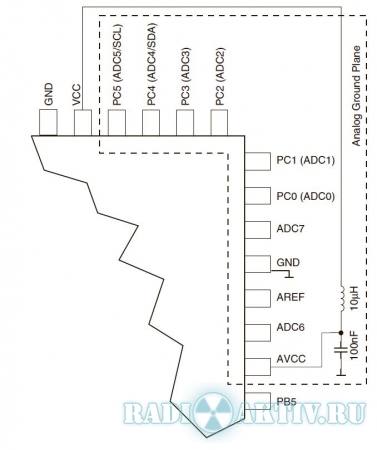
Входом АЦП является вывод PC0(ADCO), установлен по умолчанию в регистре ADMUX. Так как вольтметр у нас должен измерять напряжение от 0 до 25V, а 25V для порта контроллера это очень много, в таких случаях используют делитель напряжения, на схеме это резисторы R1 и R2. Например, если напряжение на входе будет меняться от 0 до 25V, то на выходе оно будет меняться от 0 до 5V. Резистор R3 — подстроечный, служит для подстройки отображаемого на дисплее уровня напряжения, желательно многооборотный. Источником опорного напряжения будет вывод питания AVCC с внешним конденсатором на выводе AREF, режим активируется установкой бита REFS0 в регистре ADMUX. Для снижения влияния шумов на результат преобразования вывод AVCC необходимо связать с цифровым питанием VCC через LC-цепь.
Рассчитаем максимальное входное напряжение делителя, чтобы случайно не подать на вход большее напряжение и не повредить микроконтроллер.
Применим такую формулу, где: R1 = 100k, R2 = 25k, Uin = 5V,
Umax = Uin*(R1+R2)/R2
Umax = 5*125k/25k = 25V
Из этого мы знаем, что больше 25V на вход делителя напряжения подавать нельзя.
Результат преобразования в Вольтах вычисляется по формуле:
U = ADC*Uref*K/1024
где ADC — результат преобразования;
Uref опорное напряжение(V);
K — коэффициент делителя напряжения.
1024 — Разрядность АЦП 10 бит
Коэффициент делителя напряжения напряжения вычисляется по формуле:
K = (R1+R2)/R2
K = (100k + 25k)/25k = 5
В нашем примере максимальная разрешающая способность будет 10 разрядов, поэтому частота на входе схемы последовательного приближения должна быть в диапазоне 50…200 кГц. Установим ее впределах 125kHz, включим предделитель на 64 путем установки битов ADPS2 и ADPS1 в регистре ADCSRA.
В программе используем прерывание по окончании преобразования АЦП, для этого включим непрерывный режим работы АЦП путем установки бита ADFR и активируем прерывание битом ADIE в этом же регистре ADCSRA
В обработчике прерывания от АЦП 10-ти битный результат преобразования(ADC) после каждого измерения помещаем в буфер, а уже в основном цикле значение буфера делим на количество измерений для усреднения показаний. Далее, применив формулу, вычисляем результат преобразования, переводим результат вычисления в милливольты, путем умножения на 100, и выводим его на дисплей. Полный текст программы ниже.
При программировании установить такие Fuse — биты:
Источник