
- Влияние напряжения сети на механическую характеристику асинхронной машины
- Влияние изменения напряжения источника питания на механические характеристики асинхронной машины
- Как изменяются параметры трехфазного асинхронного двигателя при условиях, отличных от номинальных?
- Влияние режима напряжения на работу асинхронных электродвигателей
- Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Влияние напряжения сети на механическую характеристику асинхронной машины

Поскольку в питающих сетях присутствует падения напряжений, которые могут вызываться различными факторами (нехваткой мощности сети, прямой пуск электроприводов большой мощности и так далее), то эти падения имеют негативное влияние на работу асинхронных электроприводов. Рассмотрим почему.
Как известно момент, который будет развивать асинхронный электродвигатель, в не зависимости от скольжения машины, всегда будет пропорционален квадрату напряжения приложенного к его обмоткам:

Где: m1 – количество фаз питающего напряжения, ω0 – скорость холостого хода измеряемая в радианах в секунду – рад/с.

Подставив в эти выражения значения скольжения, напряжения и тока получим определенное семейство характеристик асинхронного электродвигателя при различных значениях напряжения на зажимах электродвигателя.

Данные характеристики построены не в стандартных осях момента М и скольжения s, а в относительных единицах.
Из приведенных выше характеристик четко видно, что скольжение асинхронной машины не зависит от изменений питающего напряжения. Устойчива работа электропривода возможна со статическим моментом только на участке от синхронной скорости до критического скольжения (sк). Соответственно при снижении напряжения питания эта зона существенно снижается. Также у асинхронного электродвигателя значительно снижается пусковой момент, что делает невозможным его запуск с номинальным моментом при значительном снижении напряжения питающей сети.
Так как снижение напряжения наблюдается не только в бытовых но и в промышленных сетях, необходимо убедится, что значения критического и пускового момента асинхронного электродвигателя будут удовлетворять заданным параметрам рабочего органа даже при минимально возможном напряжении питания данной сети. Это необходимо для безаварийной и надежной работы систем.
Источник
Влияние изменения напряжения источника питания на механические характеристики асинхронной машины




![]()
![]()
Для изменения напряжения, подводимого к статорной обмотке асинхронной машины, применяются регулируемые источники напряжения, например, автотрансформатор, индукционный регулятор, тиристорный регулятор напряжения и др.
Пусть частота напряжения, подводимого к обмотке статора, остается неизменной f1=const. Как влияет изменение напряжения источника питания на механические характеристики асинхронной машины?
В пределах рабочего участка механической характеристики (-SK
током сверх допустимой температуры даже при отсутствии полезной нагрузки на его валу. Поэтому в дальнейшем будет рассматриваться влияние на механические характеристики асинхронной машины только изменения напряжения от номинального значения до нуля.
Итак, пусть напряжение U1, подаваемое на статорную обмотку асинхронного двигателя, уменьшается от номинального значения. Угловая скорость вращения магнитного поля не зависит от напряжения ω1=2πf/p, следовательно, все механические характеристики пройдут через одну точку на оси ординат, соответствующую режиму идеального холостого хода асинхронного двигателя (S=О). Момент, развиваемый двигателем при любом скольжении, пропорционален квадрату приложенного напряжения (56), а токи обмоток статора и ротора пропорциональны приложенному напряжению (52) и (53);
 |
 |




Рис.11. Механические характеристики асинхронного двигателя при изменении напряжения источника питания
Из приведенного на рис.11 семейства механических характеристик асинхронной машины при изменении напряжения видно, что критическое скольжение для всех характеристик остается неизменным, независящим от приложенного напряжения (57)
 |
Крутизна характеристик при понижении напряжения возрастает, но так как Sк остается неизменным, то регулирование скорости двигателя возможно лишь в узких пределах.
Коэффициент мощности при понижении напряжения имеет тенденцию к увеличению, особенно заметному при небольших нагрузках, так как уменьшается намагничивающий ток двигателя.
Чтобы определить, как влияет изменение напряжения на КПД двигателя, примем момент статического сопротивления МС, создаваемый рабочей машиной, постоянным, не зависящим от угловой скорости вращения. Тогда при уменьшении напряжения механические потери остаются практически без изменения, потери в стали уменьшаются приблизительно пропорционально квадрату напряжения источника питания, потери в обмотке ротора увеличиваются пропорционально I2 2 (ΔРЭ2=m2I2 2 r2, MC=M=CMI2’Фm, при уменьшении магнитного потока Фm возрастает ток ротора I2’ с тем, чтобы момент оставался постоянным), потери в обмотке статора зависят от соотношения между токами I10 и I2, из которых ток намагничивания I10 уменьшается, а ток ротора возрастает. В целом КПД асинхронного двигателя при малых нагрузках с уменьшением напряжения возрастает, а при увеличении нагрузки падает.
Приведенный выше анализ влияния изменение напряжения источника питания на механические характеристики асинхронной машины выполнен без учета влияния насыщения стали и вытеснения токов в стержнях обмотки ротора короткозамкнутого асинхронного двигателя. Эти явления приводят к еще большему уменьшению значений момента и тока асинхронного двигателя при уменьшении напряжения, подводимого к обмотке статора, по сравнению с теми значениями, которые определяются по формулам (52) и (56).
Источник
Как изменяются параметры трехфазного асинхронного двигателя при условиях, отличных от номинальных?
Понижение напряжения при номинальной частоте приводит к уменьшению тока холостого хода и магнитного потока, а значит, и к уменьшению потерь в стали. Величина тока статора, как правило, повышается, коэффициент мощности увеличивается, скольжение возрастает, а к. п. д. несколько падает. Вращающий момент двигателя уменьшается, так как он пропорционален квадрату напряжения.
При повышении напряжения сверх номинального и номинальной частоте двигатель перегревается из-за увеличения потерь в стали. Вращающий момент двигателя растет, величина скольжения уменьшается. Ток холостого хода увеличивается, а коэффициент мощности ухудшается. Ток статора при полной нагрузке может уменьшиться, а при малой нагрузке может увеличиться вследствие увеличения тока холостого хода.
При уменьшении частоты и номинальном напряжении увеличивается ток холостого хода, что приводит к ухудшению коэффициента мощности. Ток статора обычно возрастает. Увеличиваются потери в меди и стали статора, охлаждение двигателя несколько ухудшается вследствие уменьшения частоты вращения.
При повышении частоты сети и номинальном напряжении уменьшается ток холостого хода и вращающий момент.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Влияние режима напряжения на работу асинхронных электродвигателей
Анализ зависимостей изменения величины дополнительных потей для различных типов двигателей от напряжения на их зажимах показывает что наиболее существенное влияние имеет значение коэффициента загрузки двигателя.
Установлено, что общим для рассмотренных двигателей является увеличение потребляемой реактивной мощности при увеличении подведенного напряжения.
Кроме того, удельное потребление реактивной мощности растет уменьшением коэффициента загрузки.
Для приближенных расчетов можно принимать, что для наибо распространенных трехфазных двигателей серии 4А мощностью 20 — 100 кВт повышение напряжения на 1% приводит к росту реактивной мощности приблизительно на 3%. Для двигателей меньшей номинальной мощности cоответствующее увеличение потреблямой реактивной мощности достигает 5 — 7%
При изменении напряжения на зажимах двигателя изменяется скольжение, а следовательно, и скорость вращения.
При снижении напряжения скорость вращения двигателей заметно снижается, особенно для двигателей меньшей мощности. Наоборот, повышение напряжения приводит к увеличению скорости двигателелей.
При работе двигателей с малыми коэффициентами загрузки влият изменения напряжения на скорость двигателей практически очень мало.
При оценке влияния изменения напряжения на экономичность работы асинхронных двигателей следует учитывать стоимость дополнтельных потерь электроэнергии, вызванных отклонением напряжения увеличение реактивной мощности, потребляемой двигателем, а также изменение экономических показателей, связанных с влиянием изменения скорости вращения на производительность соответствующих механизмов.
В настоящее время отсутствует единая методика оценки экономичности работы асинхронных двигателей. Некоторые специалисты вообще отрицают целесообразность и возможсть практического выполнения подобных расчетов, мотивируя это что изменение активной и реактивной мощности, потребляемой двигателем при относительно небольших отклонениях от номинального напряжения, мало, а влияние изменений скорости двигателей на (производительность механизмов в этих условиях практически вообще отсутствует и не может быть даже замечено.
В то же время имеются данные о том, что правильная оценка влияния изменений напряжения на экономичность работы асинхронных электродвигателей в ряде случаев позволяет получить существенный эффект.
Если влияние скорости вращения двигателя на производительность механизмов имеет место, то напряжение на зажимах двигателей должно поддерживаться не ниже номинального при малых коэффициентах грузки, и в пределах наибольшего допустимого значения при больших коэффициентах загрузки (близких к номинальной).
При отсутствии влияния скорости вращения двигателя на производительность механизмов целесообразно поддерживать напряжение на зажимах двигателей не выше номинального при больших коэффициентах загрузки и ниже номинального при малых коэффициентах загрузки.
Экономические характеристики могут быть построены как для отдельных электроприемников, так и для узлов распределительной сети или для узлов нагрузки электрических систем.
Размещено компанией ООО «ЭЛТЕХКОМ-ЕК» [03.12.2009]
Источник
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U 2 1. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f(s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора
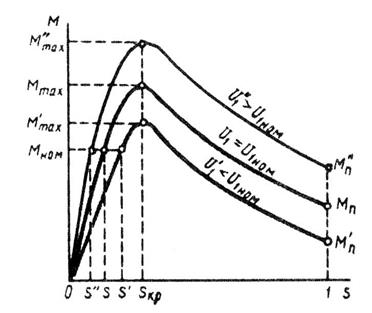
Рис. 13.5. Влияние напряжения на вид механической
характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном . Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
M / max = 0,7 2 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2 , то при понижении напряжения на 30% перегрузочная способность двигателя λ’ = М’max /Мном = 0,49 Mmax /Mном = 0,49  2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 . Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2‘. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2‘ до некоторого значении. На рисунке это соответствует сопротивлению г2‘ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2‘ пусковой момент уменьшается.
Анализ графиков М = f(s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2‘ сопровождаются изменениями частоты вращения: с увеличением r2‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
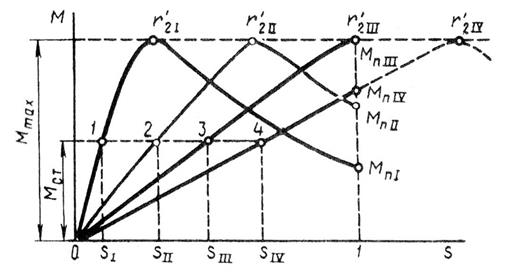
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических
характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2‘ . При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I /2 2) .Выбранное значение г2‘ должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f(U1) и М = f(r2‘) имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
Источник