
- Какое напряжение в танке
- Танки и танковые войска. Ч.1 Бронированные машины
- (Танки и танковые войска / Коллектив авторов. Под ред. Маршала бронетанковых войск А. X. Бабаджаняна. — М.: Военное издательство, 1970)
- ГЛАВА II ТАНКИ
- РАЗДЕЛ 5. ЭЛЕКТРООБОРУДОВАНИЕ, АВТОМАТИКА И НАВИГАЦИОННАЯ АППАРАТУРА
- § 1. ЭЛЕКТРООБОРУДОВАНИЕ ТАНКА
- § 2. АВТОМАТИКА ТАНКОВ
- § 3. НАЗЕМНАЯ НАВИГАЦИОННАЯ АППАРАТУРА
Какое напряжение в танке
ОБЕСПЕЧИВАЮЩИЕ СИСТЕМЫ И ОБОРУДОВАНИЕ
Электрооборудование Т-90 постоянного тока и, за исключением аварийных цепей, одно-проводное. Напряжение бортовой сети 22-29 В. Напряжение в стартерной цепи в момент работы стартера — 48 В. Источниками питания бортовой сети являются аккумуляторные батареи и стартер-генераторная установка.
В танке Т-90 используются стартерные свин-цово-кислотные аккумуляторные батареи. В машину можно устанавливать аккумуляторы марки 12СТ-85Р или 6СТ-140М или 6СТ-140Р в количестве 4 штук с общей электроемкостью 340, 280 и 280 Ач соответственно.
Стартер-генераторная установка представляет собой стартер-генератор постоянного тока, защищенного исполнения, смешанного возбуждения СГ-18-1С. В генераторном режиме его мощность 18 кВт, номинальное напряжение 26,5-28,5 В, в стартерном режиме мощность 21,3 кВт, напряжение 48 В.
Оборудование подводного вождения танков (ОПВТ) обеспечивает герметизацию корпуса и башни при установке съемного оборудования, движение на первой передаче по гирополуком-пасу и радиосвязи по дну водных преград шириной до 1000 м и глубиной до 5 м. Средства откачки позволяют удалять попавшую в танк воду с производительностью до 100 л/мин при противодавлении 0,4 кг/см 2 . Время монтажа и демонтажа съемного оборудования составляет не более 15 мин. Время подготовки к ведению огня после преодоления водной преграды не требуется.
Оборудование для самоокапывания. Для оборудования огневых позиций, как и все современные танки советского производства, выпускаемые с начала 70-х, Т-90 имеет встроенное бульдозерное оборудование. Ширина отвала составляет 2148 мм. Оборудование позволяет в немерзлых грунтах оборудовать танковый окоп за 20-30 минут.
Для более серьезных земляных работ танк может быть оборудован танковым бульдозером-снегоочистителем ТБС-86.
Система кондиционирования. Впервые на отечественных танках для обеспечения эффективной работы экипажа в условиях жаркого климата и поддержания температурно-влажностно-го режима в боевом отделении на Т-90 предусмотрена установка системы кондиционирования СКС-3. Она предназначена для охлаждения воздуха с последующим подводом его к местам экипажа. Система обеспечивает охлаждение, вентиляцию и частичную осушку воздуха с подачей его в обитаемое отделение. Агрегаты и узлы системы кондиционирования воздуха расположены в моторно-трансмиссионном отделении и обитаемом отделении.
Система кондиционирования состоит из компрессора, конденсатора, ресивера, блока обработки воздуха, отделителя жидкости, которые связаны между собой трубопроводами в замкнутый холодильный контур, а также из воздуховодов, блока управления, блока силовой коммутации и электрических кабелей.
Хладопроизводительность системы не менее 2900 Вт при температуре окружающего воздуха +50°С и его относительной влажности 45%.
Источник
Танки и танковые войска. Ч.1 Бронированные машины
(Танки и танковые войска / Коллектив авторов. Под ред. Маршала бронетанковых войск А. X. Бабаджаняна. — М.: Военное издательство, 1970)
ГЛАВА II
ТАНКИ
РАЗДЕЛ 5. ЭЛЕКТРООБОРУДОВАНИЕ, АВТОМАТИКА И НАВИГАЦИОННАЯ АППАРАТУРА
§ 1. ЭЛЕКТРООБОРУДОВАНИЕ ТАНКА
Для повышения боеготовности и боеспособности боевых машин в конструкции современных иностранных танков широко применяется автоматика. <112>Теперь боевые качества танка в значительной степени зависят от совершенства и надежности установленных в нем электрических автоматических систем, а также отдельных электрических машин, приборов и аппаратов.
Характерной особенностью системы электрооборудования современного танка являются ее насыщенность мощными потребителями электрической энергии и вызванное этим значительное увеличение мощности источников электрической энергии.
Увеличение количества и мощности потребителей электрической энергии в танке объясняется теми преимуществами, которыми обладают электрическая энергия и электроприводы по сравнению с другими видами энергии и другими видами исполнительных (силовых) приводов, например, гидравлическим или пневматическим.
Применение электрической энергии для управления исполнительными (силовыми) приводами обеспечивает возможность осуществления дистанционного управления, что позволяет понизить вес и упростить конструкцию всей системы исполнительного привода. Электрическая система управления исполнительным приводом в свою очередь позволяет наиболее эффективно осуществить его автоматизацию с помощью простых средств и схемных решений. Автоматизация приводов повышает их быстродействие, улучшает характеристики и обеспечивает максимальные удобства при применении.
Электрооборудование танков развивалось одновременно с развитием конструкций танков, танкового оружия и танковых двигателей. Несмотря на то что процесс развития и усовершенствования протекал в течение многих лет, принципиальная схема электрооборудования танка оставалась почти без изменений. До сих пор на танках применяется система электрооборудования постоянного тока напряжением 26±4 в, обладающая следующими существенными достоинствами:
— система является наиболее отработанной и изученной. Стандартизация номинальных напряжений обеспечила возможность создания унифицированных двигателей, контакторов, реле и другой аппаратуры;
— простота системы, которая обусловлена возможностью ее выполнения по однопроводной схеме;
— безопасность работы экипажа при принятом номинальном напряжении бортовой сети;
— большие значения пусковых моментов у приводных электродвигателей постоянного тока;
— возможность работы генератора в режиме электродвигателя при применении его в качестве стартера;
— возможность непосредственного привода генератора от двигателя танка (без муфты постоянной скорости).
Учитывая непрерывное возрастание суммарной мощности электрооборудования танка, числа потребителей тока, сопровождающееся увеличением протяженности линий передач электрической энергии, и широкое применение потребителей переменного тока, можно сделать вывод, что возможности дальнейшего развития данной системы электрооборудования ограничены. Основными недостатками системы электрооборудования на постоянном токе являются:
— наличие щеточно-коллекторного узла в электрических машинах;
— трудность выполнения жидкостного охлаждения генератора постоянного тока;
— необходимость установки преобразователей тока для получения переменного тока необходимых параметров;
— увеличение веса системы электрооборудования при сохранении номинального напряжения бортсети 26±4 в.
При увеличении мощности электрооборудования танка и протяженности линий электропередач выше определенных пределов целесообразно повысить номинальное напряжение до некоторого оптимального значения, при котором может быть понижен вес проводов и отдельных элементов электрооборудования.
Установлено, что вес отдельных элементов электрооборудования танка при повышении номинального напряжения изменяется неодинаково: вес одних элементов снижается, а других увеличивается. Так, например:
— вес генераторов, электрических двигателей и различной арматуры несколько понижается;
— вес аккумуляторной батареи данной емкости заметно увеличивается;
— вес электрических проводов в силовых цепях, по которым передается энергия для питания мощных потребителей, значительно понижается; вес проводов, по которым проходят небольшие токи, изменяется мало, так как их сечение выбирается не по допустимой нагрузке или падению напряжения, а из соображений механической прочности провода.
Кроме того, при дальнейшем увеличении номинального напряжения сокращаются сроки службы малогабаритных ламп накаливания, так как нити ламп для увеличения сопротивления приходится делать более тонкими, что сильно уменьшает их механическую прочность.
Эти противоречивые обстоятельства вынуждают конструкторов при компоновке системы электрооборудования танка для получения нужных рабочих напряжений в отдельных системах применять электромашинные преобразователи напряжения, а для получения переменного тока — электромашинные преобразователи тока, что увеличивает вес, габариты и стоимость системы электрооборудования.
Напряжение бортовой сети танка выше 30 в нецелесообразно, так как это не решит все поставленные вопросы, а необходимость питания потребителей переменным током вновь потребует установки преобразователей тока.
Основываясь на опыте развития электрооборудования, можно сказать, что система электрооборудования танка на постоянном токе отвечает требованиям сегодняшнего дня. При дальнейшем расширении системы электрооборудования танка и более интенсивном внедрении потребителей переменного тока не исключено, что традиционная система постоянного тока будет соответствующим образом реконструирована.
Танковые генераторы. Генератор является основным источником электрической энергии в танке.
Конструкция танковых генераторов отличается характерными особенностями, обусловленными необходимостью установки их на танке в весьма ограниченном по размерам и труднодоступном месте. Поэтому танковый генератор должен иметь незначительные габариты и обладать высокой надежностью, при которой обеспечивается его нормальная работа в течение всего гарантийного срока без обслуживания и замены щеток.
Танковый генератор работает в тяжелых условиях, которые отличаются интенсивной тряской и вибрациями мест крепления генератора, повышенной температурой (до 105°С) и сильной запыленностью.
Мощность танковых генераторов постоянного тока непрерывно растет и в настоящее время достигает 15 квт. При увеличении мощности <114>танковых генераторов постоянного тока труднее создать надежный щеточно-коллекторный узел, так как при этом увеличивается масса коллектора, затрудняется обеспечение его механической прочности, увеличиваются потери в щеточно-коллекторном узле, что вызывает нагрев щеток, максимальная температура которых не должна превышать 180—220°С. При превышении этой предельной температуры коммутация ухудшается, а щетки быстро изнашиваются.
Увеличение мощности танковых генераторов постоянного тока сопровождается непрерывными усовершенствованиями их конструкции и улучшением охлаждения, что положительно сказывается на коммутации.
Необходимость уменьшения габаритов и веса танкового генератора постоянного тока требует увеличения начальной и максимальной скорости вращения его вала. Это приводит к дополнительным потерям на коллекторе и ухудшению коммутации, быстрому износу щеток и необходимости повышения механической прочности коллектора, а также применения подшипников повышенной надежности. Кроме того, наличие щеточно-коллекторного узла ограничивает возможность применения более эффективной жидкостной системы охлаждения генератора.
Таким образом, увеличением скорости вращения вала танкового генератора постоянного тока нельзя обеспечить создание генератора большой мощности и необходимой надежности.
Опыт применения генераторов переменного тока на автомобилях и в авиации показал, что синхронные генераторы свободны от этих недостатков. Надежность авиационного генератора переменного тока в два раза выше надежности генератора постоянного тока. Удельная мощность автомобильного генератора переменного тока в 1,5 раза выше, чем у генератора постоянного тока (из-за значительного снижения его веса).
Максимальная скорость вращения якоря генератора переменного тока ограничивается только подшипниками, и при принудительной смазке его жидкими маслами она может достигать весьма больших значений.
Большое влияние на размеры генераторов и их характеристики оказывает способ регулирования напряжения, точнее, определяемая с помощью этого способа величина тока возбуждения генератора. Применение вибрационных регуляторов напряжения вызывало необходимость уменьшения тока возбуждения генератора до такой величины, при которой обеспечивалась нормальная работа контактов регулятора напряжения. Это приводило к тому, что магнитные цепи генераторов были слабо насыщены, а это ухудшало показатели электромагнитного использования железа генератора. Этот недостаток устранялся разделением обмотки возбуждения на две параллельные ветви и включением в каждую из них собственного регулятора напряжения. В результате cyммарный ток возбуждения генератора увеличивался вдвое, что увеличивало насыщение магнитной цепи генератора.
Применение вибрационных регуляторов для регулирования напряжения танковых генераторов в значительной степени понижает надежность работы генератора как основного источника электрической энергии.
Главным недостатком вибрационных регуляторов является нестабильность их регулировки. Величина напряжения, на которое был отрегулирован регулятор напряжения, с течением времени изменяется из-за износа контактов, старения пружин и подвески якорька. Кроме того, наблюдается перегрев и старение изоляции основных обмоток регуляторов напряжения, а обеспечить надежную термокомпенсацию регуляторов напряжения при изменении окружающей температуры от −40 до +70°С очень трудно.
Поэтому было бы целесообразно отказаться от вибрационных регуляторов напряжения и перейти на бесконтактные транзисторные регуляторы напряжения, не ограничивающие величину тока возбуждения генератора.
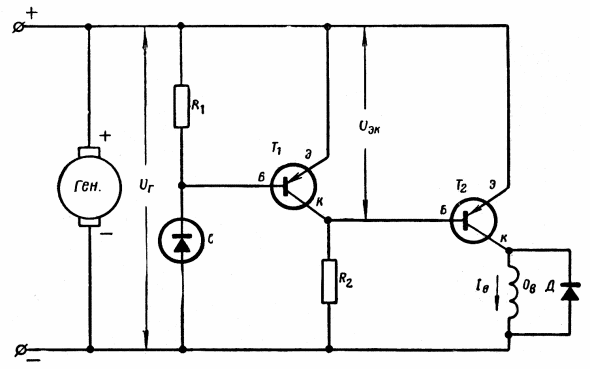
Рис. 72. Принципиальная схема бесконтактного транзисторного регулятора напряжения
Принципиальная схема бесконтактного транзисторного регулятора напряжения генератора постоянного тока (рис. 72) состоит из измерительного устройства (ИУ), составленного из сопротивлений R1, R2, управляемого транзистора T1 и стабилитрона С, и из регулирующего устройства (РУ), воздействующего на цепь возбуждения, функции которого выполняет транзистор Т2.
Напряжение генератора Uг подается на вход измерительного устройства. Выходным напряжением измерительного устройства является напряжение Uэк, снимаемое с зажимов Э и К транзистора Т1. К выходу измерительного органа подключен транзистор Т2, в цепь коллектора которого включена обмотка возбуждения генератора.
Транзистор Т2 является переменным сопротивлением, величина которого изменяется в широких пределах. Когда транзистор Т2 открыт, его сопротивление равно сотым долям ома, а когда закрыт, оно достигает сотен тысяч ом.
Для того чтобы транзистор Т2 находился в открытом состоянии, необходимо на его эмиттерный переход (эмиттер-база) подать определенное отпирающее напряжение.
До тех пор, пока напряжение генератора будет ниже напряжения пробоя стабилитрона С, ток через него проходить не будет. Поэтому на сопротивлении R1 не будет падения напряжения. При этом потенциалы базы и эмиттера транзистора Т1 будут одинаковы, вследствие чего транзистор Т1 будет заперт. Поскольку сопротивление транзистора Т1 в этот момент будет неизмеримо больше сопротивление R2, то можно считать, что почти все напряжение генератора будет приложено к зажимам <116>Э и К транзистора T1. Это же напряжение прикладывается к зажимам Э и Б транзистора T2.
Транзистор Т2 отпирается, и через него будет проходить ток возбуждения Iв генератора.
Как только напряжение генератора превысит напряжение пробоя стабилитрона С, через него пойдет ток. Этот ток создает на сопротивлении R1 падение напряжения, которое прикладывается к эмиттерному переходу транзистора Т1 в отпирающем направлении, благодаря чему транзистор Т1 отпирается и его сопротивление уменьшается до ничтожно малой величины. При этом падение напряжения на транзисторе Т1 также сильно уменьшается (до нескольких десятых долей вольта).
Можно считать, что выходной сигнал измерительного органа в этот момент равен нулю. Это вызывает запирание транзистора Т2 и резкое уменьшение тока возбуждения и напряжения генератора. При этом транзистор Т1 запирается, а Т2 вновь отпирается. Этот процесс будет продолжаться с определенной частотой.
Данная схема находит все более широкое применение.
Танковые аккумуляторные батареи. Характерной особенностью современных аккумуляторных батарей, устанавливаемых на танках и автомобилях, является возможность их длительного хранения в сухом заряженном состоянии на складах (до пяти лет). Применение порошковой технологии изготовления активной массы для положительных и отрицательных пластин и использование сепараторов из мипора и мипласта (вместо деревянных) обеспечили надежную работу аккумуляторной батареи и в сильной степени уменьшили вероятность сульфатации пластин.
Отличные пусковые качества современных аккумуляторных батарей, обеспечивающих запуск танковых и автомобильных двигателей с высокой степенью сжатия в холодное время года, объясняется введением древесноорганических присадок — расширителей (гуминовой кислоты, торфяных продуктов и т. п.) в активную массу отрицательных пластин, повышающих напряжение аккумулятора при разряде. Однако эти присадки вызывают необходимость повышения зарядного напряжения. Для уменьшения их влияния в активную массу пластин вводится небольшое количество ионов кобальта или никеля, снижающих зарядное напряжение. Ионы никеля снижают потенциал отрицательных пластин, а ионы кобальта — потенциал положительных пластин. Применяемые соединения никеля безвредны для деталей аккумулятора.
Наряду с положительными свойствами свинцовых кислотных аккумуляторов необходимо отметить их существенный эксплуатационный недостаток: при понижении температуры аккумулятора условия его заряда на машине резко ухудшаются — аккумулятор не принимает заряд. Это объясняется тем, что в процессе заряда на его зажимах появляется э. д. с., направленная навстречу приложенному зарядному напряжению. Величина этой встречной э. д. с. зависит в первую очередь от плотности электролита в порах пластин и концентрации в нем ионов свинца. Разность между приложенным зарядным напряжением и встречной э. д. с. является той эффективной э. д. с., которая, так же как и внутреннее сопротивление аккумуляторной батареи, определяет скорость ее заряда. Для оценки способности аккумуляторных батарей принимать заряд при низких температурах разрабатываются специальные методы.
Сущность одного из таких методов заключается в следующем. Для контроля принимаемости заряда берется новая неиспытанная, полностью заряженная батарея с температурой электролита 21—32°С. Батарея должна заряжаться током, равным току 20-часового разряда: Iз = Iр20r. <117>Затем батарея разряжается на 50% и охлаждается до −1°С. Охлажденная до температуры −1°С батарея включается на зарядку. Батареи, имеющие номинальное напряжение 12 в, заряжаются при напряжении 14,4 в.
Оценочным параметром принимаемости заряда является величина зарядного тока в конце десятой минуты после начала зарядки. Зная величины зарядного тока, можно получить исчерпывающие данные об эксплуатационной надежности батарей.
§ 2. АВТОМАТИКА ТАНКОВ
В танке уже давно применяются автоматические системы для регулирования скорости вращения двигателя и напряжения танкового генератора.
В последние годы были автоматизированы процессы управления вооружением танка и достигнута эффективная стабилизация танкового оружия, что обеспечило возможность ведения огня из танков с ходу. Кроме того, на танках применяются системы противоатомной защиты (ПАЗ) и противопожарного оборудования.
Стабилизаторы вооружения танков
Колебания корпуса танка затрудняют наблюдение за полем боя, поиск целей, наведение орудия в цель и наблюдение за результатами стрельбы. Это происходит потому, что при колебаниях корпуса танка поле зрения прицела, как и других оптических приборов танка, не остается неподвижным относительно местности, а непрерывно колеблется вместе с корпусом танка. Одновременно с колебаниями поля зрения прицела будет колебаться и прицельная марка. Колебания прицельной марки относительно цели значительно увеличивают ошибки при прицеливании и ухудшают результаты стрельбы с ходу по сравнению со стрельбой из танка с места.
Время запаздывания выстрелов в сочетании с угловыми колебаниями корпуса танка вызывает увеличение рассеивания снарядов и пуль и ухудшение результатов стрельбы.
Для современных танковых орудий при наличии электромагнитного спускового устройства время запаздывания выстрела составляет не менее 0,14 сек. За это время ось канала ствола успевает отклониться на значительный угол и изменить свое направление в пространстве, что вызывает значительные отклонения снарядов или пуль по высоте и направлению. Рассеивание снарядов и пуль при стрельбе из танка с ходу в несколько раз выше, чем при стрельбе из танка с места.
При угловых колебаниях корпуса танка на орудие от корпуса танка будут передаваться возмущающие моменты. Величина возмущающих моментов определяется неуравновешенностью орудия, абсолютной скоростью поворота орудия и моментом трения в опорах орудия (цапфах или погоне башни). Воздействие возмущающих моментов на орудие вызывает его поворот в опорах и изменение заданного направления оси канала ствола.
Для сохранения заданного направления орудию необходимо прикладывать к нему дополнительный (стабилизирующий) момент, равный по величине и противоположный по направлению возмущающему моменту.
Эта задача успешно решается при установке в танк специальных стабилизаторов вооружения, с помощью которых определяется направление и измеряется величина угловых отклонений орудия от заданного направления. Эти отклонения преобразуются в управляющий электрический <118>сигнал, который в дальнейшем в исполнительном органе стабилизатора преобразуется в стабилизирующий момент, благодаря чему орудие удерживается в заданном положении.
Стабилизатор танкового вооружения представляет собой систему автоматического регулирования, реагирующую на угловые отклонения орудия от заданного направления и обеспечивающую сохранение заданного направления орудию, чем достигается повышение меткости стрельбы из танка с ходу.
Для наведения орудия на цель стабилизатор снабжается системой наведения, которая позволяет изменять заданное направление орудия.
В качестве задатчиков направления, позволяющих сохранять (задавать) любое необходимое направление орудия, во всех без исключения стабилизаторах танкового вооружения применяются гироскопические приборы — трехстепенные и двухстепенные гироскопы.
Задатчик направления закрепляется на орудии или жестко с ним связывается.
В выполненных конструкциях стабилизаторов стабилизирующие моменты (пропорциональные величине управляющих сигналов), воздействующие на орудие и башню танка, создаются электромашинными или электрогидравлическими приводами.
Принятая классификация стабилизаторов танкового вооружения помогает выявить следующие принципиальные и конструктивные особенности стабилизаторов: число плоскостей стабилизации, способы передачи воздействия от задатчика направления на объект стабилизации и тип исполнительного привода.
1. По числу плоскостей стабилизации все стабилизаторы вооружения разделяются на одноплоскостные и двухплоскостные.
2. Воздействия гироскопического задатчика направления на стабилизируемый объект в стабилизаторе вооружения могут передаваться непосредственно через соединение задатчика направления со стабилизируемым объектом с помощью механической передачи или от задатчика направления на исполнительный орган стабилизатора управляющего сигнала.
В зависимости от знака и величины управляющего сигнала исполнительный орган стабилизатора будет оказывать соответствующее воздействие на стабилизируемый объект и препятствовать его отклонению под воздействием возмущающих моментов.
Стабилизаторы, в которых задатчик направления не оказывает непосредственного воздействия на объект стабилизации, а применяется только для создания управляющих сигналов, принято называть индикаторными. Необходимым элементом такого стабилизатора является усилитель, который усиливает сигналы, выдаваемые задатчиком направления для управления исполнительными органами стабилизатора.
3. Тип исполнительного привода. Стабилизирующий момент, пропорциональный знаку и величине управляющего сигнала, полученного от задатчика направления, и силовое воздействие на объект стабилизации создаются исполнительным приводом стабилизатора вооружения.
В стабилизаторах вооружения применяются электромеханические (электромашинные) и электрогидравлические приводы.
Как уже указывалось, стабилизатор вооружения танка является системой автоматического регулирования с регулированием по отклонению. Система автоматического регулирования обеспечивает постоянство регулируемой величины при изменении возмущающих воздействий и пропорциональное изменение ее при изменении знака и величины управляющего сигнала. Система автоматического регулирования с регулированием <119>по отклонению предусматривает последовательное выполнение следующих основных операций.
(применительно к стабилизатору вооружения танка) — задание угла возвышения орудия, т. е. задание направления оси канала ствола орудия (φзад).
(в стабилизаторе вооружения танка) — измерение отклонения оси канала ствола орудия от заданного направления, т. е. измерение угла рассогласования [Δφ = ±(φзад − φ0)]. Для этой цели необходимо ввести в систему стабилизации жесткую отрицательную обратную связь, наличие которой позволит сравнивать действительное направление орудия φ0 с заданным φзад.
. При этом физическая природа управляющего сигнала должна обеспечивать возможность его передачи в последующие элементы системы. В стабилизаторе вооружения наиболее удобным является получение электрических управляющих сигналов.
(устранение рассогласования). В стабилизаторе вооружения танка для устранения рассогласования необходимо создать стабилизирующий момент (Мс), который уравновесит возмущающий момент (Мв) и, воздействуя на орудие, возвратит его в заданное положение. Момент, действующий на орудие, равен Мо = Мс − Мв.
Итак, задание регулируемой величины, т. е. задание угла возвышения орудия (φзад) на движущемся танке и его стабилизация при стрельбе с ходу, является первостепенной задачей, а гироскопический задатчик направления — важнейшим элементом стабилизатора вооружения танка. Гироскопический задатчик направления вместе с электрическим датчиком (рис. 73) образует датчик угла.
Кроме того, датчик угла снабжается специальной системой наведения, с помощью которой наводчик может изменять направление оси канала ствола.
Стабилизатор вооружения танка работает в такой последовательности. Наводчик, обнаружив цель, воздействует с помощью системы наведения на гироскопический задатчик и задает нужное направление стабилизируемой оси гироскопа φзад, которому должно соответствовать направление оси канала ствола стабилизированного орудия, после чего наводчик прекращает наведение (прекращает воздействие на систему наведения) и принимает решение о производстве выстрела.
Под действием возмущающего момента Мв, передаваемого на орудие при колебаниях корпуса танка, ось канала ствола будет отклоняться от заданного направления. Возникшее угловое рассогласование (Δφ) между заданным направлением оси канала ствола орудия φзад и его действительным направлением φ0 измеряется электрическим датчиком. При этом угловое рассогласование преобразуется в управляющий электрический сигнал. Этот сигнал усиливается в усилителе до величины, которая необходима для управления исполнительным приводом стабилизатора орудия.
Исполнительный привод создает стабилизирующий момент Мс, под действием которого орудие поворачивается в сторону, противоположную направлению поворота корпуса танка. Благодаря этому возникшее угловое рассогласование уменьшается, а направление оси канала ствола орудия сохраняется неизменным с определенной точностью.
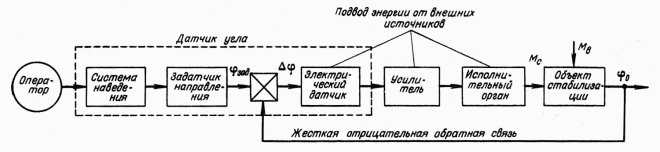
Рис. 73. Функциональная схема простейшего одноплоскостного стабилизатора вооружения индикаторного типа
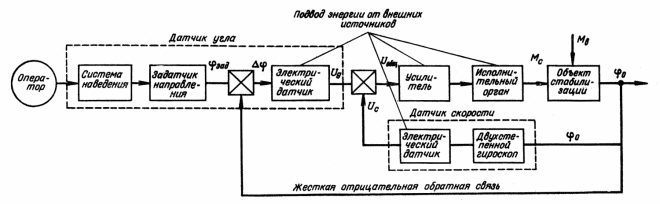
Рис. 74. Функциональная схема одноплоскостного стабилизатора вооружения, имеющего датчик угла и датчик скорости
Таким образом, во время движения танка, после того как наводчик прекратит наведение, орудие будет воспринимать воздействие внешних возмущающих моментов Мв, которые будут вызывать отклонения орудия от заданного направления. Одновременно орудие будет находиться под воздействием стабилизатора, который будет непрерывно приводить орудие в соответствие с заданным направлением.
Недостаток стабилизатора орудия, выполненного по схеме (рис. 73), состоит в том, что орудие после воздействия возмущающего момента Мв будет колебаться около заданного направления с чрезмерно большой амплитудой в течение продолжительного времени. Этот недостаток простейших стабилизаторов исключает возможность применения их в танках.
Однако качество простейшего стабилизатора вооружения может быть значительно улучшено, если уменьшить амплитуды колебаний орудия относительно заданного направления. Одновременно сократится и время регулирования, т. е. то время, в течение которого колебания орудия затухают до допустимой величины.
Уменьшение амплитуд колебаний орудия может быть достигнуто путем изменения формы управляющего сигнала (вида кривой управляющего сигнала), выдаваемого датчиком угла.
Для этой цели в первый момент возникновения рассогласования сразу после воздействия возмущающего момента необходимо резко увеличить управляющий сигнал, чтобы исполнительный привод стабилизатора энергично препятствовал начавшемуся отклонению орудия. При подходе же орудия к заданному направлению необходимо изменить знак управляющего сигнала, для того чтобы изменить направление воздействия исполнительного привода стабилизатора на обратное и притормозить орудие, не допуская его заметного перехода через заданное направление.
Изменить форму управляющего сигнала можно, если ввести в систему стабилизатора вооружения дополнительный сигнал определенной величины, пропорциональный скорости отклонения орудия. Этот сигнал нужно просуммировать с сигналом датчика угла, и тогда можно получить управляющий сигнал необходимой формы и величины.
Благодаря наличию сигнала, пропорционального скорости, орудие будет отклоняться от заданного направления на значительно меньшую величину, а при подходе к нему будет притормаживаться; совершив два-три колебания с небольшой амплитудой, орудие займет правильное направление за короткий промежуток времени.
Полная функциональная схема стабилизатора орудия с датчиком скорости показана на рис. 74. Основным отличием этой схемы от схемы, рассмотренной выше (рис. 73), является наличие датчика скорости.
Благодаря тому что сигнал, выдаваемый датчиком скорости, пропорционален скорости отклонения орудия от заданного направления, его введение в систему стабилизатора орудия является введением гибкой обратной связи. Как известно, при гибкой обратной связи в системе автоматического регулирования быстрее срабатывает система и уменьшается количество колебаний орудия после того, как наводчик, закончив наведение, возвратит рукоятки управления в нейтральное положение, или же после воздействия возмущающего момента, передаваемого на орудие при колебаниях корпуса танка.
Наряду со стабилизаторами вооружения, имеющими датчик угла и датчик скорости, выпускаются стабилизаторы, которые имеют только датчик скорости, как, например, на английском танке «Чифтен», где стабилизатор вооружения обеспечивает стабилизацию орудия в двух <122>плоскостях и состоит из стабилизатора башни и стабилизатора орудия. Оба стабилизатора индикаторного типа.
Особенностью стабилизатора танка «Чифтен» является наличие контрольных приборов, постоянно включенных в схему, с помощью которых можно проверить стабилизатор и отыскать повреждение. Функциональная схема этого стабилизатора приведена на рис. 75.
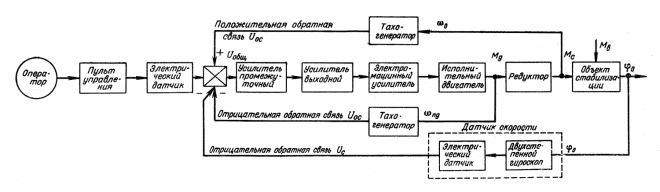
Рис. 75. Функциональная схема стабилизатора башни танка «Чифтен»
В режиме стабилизации основной сигнал выдает датчик скорости, который реагирует на абсолютную скорость движения орудия.
Исполнительный привод стабилизатора выполнен на электрических машинах. Исполнительный двигатель развивает вращающий момент Мд и через редуктор воздействует на объект стабилизации (башню с орудием), чем компенсирует действие внешнего возмущающего момента Мв.
Вследствие того что в стабилизаторе нет датчика угла, а имеется только датчик скорости, после остановки башни орудие не будет возвращено в первоначальное положение, а останется в новом положении. Но так как воздействия внешнего момента Мв имеют знакопеременный характер, то башня вместе с орудием будет удерживаться около заданного направления с некоторой точностью. Однако при воздействии на башню внешнего момента, имеющего постоянное направление, башня будет поворачиваться в направлении действия внешнего момента. Возникшее при этом отклонение орудия от заданного направления может быть устранено только оператором (наводчиком или командиром танка).
Быстродействие стабилизатора башни обеспечивается введением дополнительной отрицательной <123>обратной связи по скорости вращения исполнительного двигателя, которая осуществляется с помощью специального тахогенератора, соединенного с исполнительным двигателем.
Для устранения автоколебаний, которые могут возникнуть в системе вследствие наличия люфтов и упругих элементов в редукторе (механизме поворота башни), введена положительная обратная связь по скорости вращения башни относительно корпуса танка. Эта обратная связь вводится тахогенератором, ротор которого связан с зубчатым венцом погона башни.
Для обеспечения безопасности членов экипажа и для предотвращения поломок стабилизатора при его применении стабилизаторы должны снабжаться специальными предохранительными устройствами — блокировками.
Рассмотрим в качестве примера блокировку, исключающую заброс орудия после выстрела и обеспечивающую стопорение орудия на период «откат — накат — заряжание».
При выстреле движущиеся назад откатные части орудия создают момент неуравновешенности, величина которого значительно превышает момент, развиваемый стабилизатором. Этот момент неуравновешенности вызывает принудительный поворот орудия в цапфах в сторону увеличения угла возвышения до его максимального значения (заброс орудия). Если стрельба производилась с небольшим углом возвышения орудия, то при забросе орудие повернется на большой угол, вследствие чего наводчик сразу после выстрела потеряет цель из поля зрения и не сможет проверить результаты стрельбы. Это явление может быть предотвращено путем стопорения орудия на время выстрела в положении, близком к заданному, что облегчает наводчику наблюдение за целью и результатами выстрела. Однако начавшаяся сразу после наката стабилизация орудия сильно затрудняет действия заряжающего, которому в это время нужно перезаряжать орудие. При движении танка его корпус, а вместе с ним заряжающий и остальные члены экипажа будут совершать колебания относительно стабилизированного орудия. Всем членам экипажа будет казаться, что колебания совершает орудие, казенная часть которого непрерывно перемещается то вверх, то вниз внутри боевого отделения. Перезарядить орудие в этих условиях очень трудно. Поэтому целесообразно увеличить время стопорения орудия на весь период заряжания. Для этого нужно, чтобы устройство, обеспечивающее стопорение орудия на период «откат—накат», выключалось не в конце наката движущихся частей орудия, а после заряжания орудия заряжающим вручную.
Наличие такого устройства резко облегчает условия перезаряжания орудия, так как при движении танка и колебаниях корпуса казенная часть орудия будет сохранять свое положение в боевом отделении неизменным.
Блокировки в современных стабилизаторах обеспечивают высокую надежность их работы и гарантируют безопасность работы экипажа.
§ 3. НАЗЕМНАЯ НАВИГАЦИОННАЯ АППАРАТУРА
Наземная навигационная аппаратура представляет собой одно из основных средств автоматизации управления войсками. При управлении войсками в бою, на марше и в разведке ориентируются с помощью военно-топографических карт, путем сравнения местных предметов и рельефа местности с их изображением на карте. Этот метод ориентирования может быть успешно применен в условиях хорошей видимости <124>при наличии достаточного времени и при высокой топогеодезической подготовке офицеров. В ночное время или при плохой видимости ориентирование в лесах, горах или степной местности крайне затруднено, а в ряде случаев даже невозможно. Поэтому наличие навигационной аппаратуры на танке является совершенно необходимым хотя бы для определения местоположения машины.
Из всех возможных систем навигационной аппаратуры на танках могут быть использованы только те, в которых применяются гироскопические приборы, приборы, основанные на закономерности распространения радиоволн, и комбинированные.
Навигационная система, имеющая гироскопический указатель курса, является автономной, так как в ней исходные данные и последующая навигационная информация определяются непосредственно на борту подвижного объекта. Точность подобных систем достаточна для их практического применения на танках и бронеобъектах.
Радионавигационные системы, которые могут быть применены на танках и бронеобъектах иностранных армий в зависимости от метода определения координат движущегося объекта, разделяются на три группы: угломерные, дальномерные и разностно-дальномерные.
В радионавигационных угломерных системах координаты и направление движения подвижного объекта определяются путем измерения пеленга на два радиомаяка или более, установленные в пунктах с известными координатами.
Дальномерные радионавигационные системы основаны на использовании скорости распространения радиоволн. Местоположение подвижного объекта определяется точкой пересечения двух кривых, создаваемых двумя радиомаяками, координаты которых известны.
Разностно-дальномерные радионавигационные системы основаны на измерении разности расстояний от подвижного объекта до двух (или до двух пар) наземных радиостанций с известными координатами. Место подвижного объекта определяется по точкам пересечения линий, которые характеризуются постоянной разностью расстояний между двумя неподвижными радиостанциями и имеют вид сложных кривых гиперболического типа.
Радионавигационные системы применяются на практике. Так, разработана и испытана за рубежом радионавигационная система, которая создает над полем боя электромагнитную сетку, от которой любое количество потребителей может получать непрерывную навигационную информацию о своем местоположении. Радиус действия главной передающей станции 480 км. Точность ориентировки не более 100 м. Вес пехотной навигационной аппаратуры, переносимой в ранце, 9,5 кг.
В СССР был разработан комплект наземной навигационной аппаратуры «Янтарь-АМ-Трасса», который устанавливается на специальных бронемашинах, и несколько позже — навигационная аппаратура ТНА-2. С помощью комплекта наземной навигационной аппаратуры можно определять координаты положения подвижного объекта, водить отдельные машины и колонны по заданному маршруту или в заданный район, прокладывать колонные пути с нанесением маршрута движения на карту, наносить на карту новые дороги и решать задачи по топографической привязке боевых порядков.
Упрощенная функциональная схема наземной навигационной аппаратуры приведена на рис. 76.
Для определения текущих координат X и Y движущегося объекта непрерывно измеряются приращение пути ΔS и величина текущих значений дирекционных углов α. Приращение пути ΔS измеряется датчиком <125>пути ДП, а величины дирекционных углов — датчиком дирекционного угла ДУ. Дирекционные углы преобразуются в тригонометрические функции sin α и cos α в синусно-косинусном построителе СКП. Тригонометрические функции дирекционного угла непрерывно умножаются в
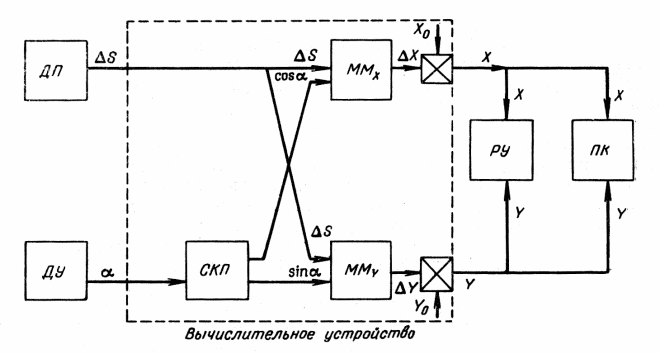
Рис. 76. Упрощенная функциональная схема наземной навигационной аппаратуры
множительных механизмах ММХ и ММY на соответствующие приращения пути ΔS. Произведения ΔS cos α = ΔХ и ΔS sin α = ΔY представляют собой приращения координат движущегося объекта.
При работе аппаратуры на движущемся объекте непрерывно суммируются приращения координат ΔХ и ΔY с начальными координатами Х0 И Y0, которые характеризовали местоположение объекта перед началом движения.
Текущие координаты X и Y считываются со шкал регистрирующего устройства РУ, а карандаш построителя курса ПК наносит маршрут движения на топографическую карту. Одновременно специальные счетчики учитывают путь, пройденный объектом, и текущее значение дирекционного угла.
В качестве датчика угла применяется гирополукомпас, который перед началом движения необходимо развернуть в плоскость меридиана.
Основные характеристики отечественной наземной навигационной аппаратуры приведены в табл. 4.
Характеристики наземной навигационной аппаратуры
Целесообразность применения наземной навигационной аппаратуры; на танках и других бронеобъектах была подтверждена также рядом учений, проведенных за рубежом в последние годы.
В настоящее время за рубежом отработан ряд автономных навигационных систем, предназначенных для установки на бронеобъекты.
В этих системах для измерения пройденного пути применяется датчик пути с вводом корректуры пути. В качестве датчика дирекционного угла применяется гирокомпас, имеющий магнитную систему, которая обеспечивает автоматический выход оси гироскопа в плоскость меридиана за 30 мин.
В некоторых системах навигационной аппаратуры нашел применение магнитоиндукционный компас с двумя индукционными датчиками, более простой по конструкции, чем гирокомпас.
Комплект аппаратуры обычно состоит из датчика пути, гирокомпаса, счетно-решающего блока (вычислительного устройства), индикаторного блока (регистрирующего устройства), планшета с картой (построителя курса), указателя курса и источников питания. Корректура пути вводится вручную маховичком корректора пути.
В настоящее время аппаратура может использоваться на машинах, развивающих скорость до 110 км/ч. При этом ошибка в определении курса не превышает 1% на марше протяженностью 100 км.
В навигационной аппаратуре применяются планшеты двух типов:
— планшет с перемоткой топографической карты на роликах. При переходе с одного места карты на другое необходима новая установка светового указателя;
— проекционный планшет, в котором используется цветная фотопленка с карты масштаба 1:50000. Форма сигналов, подаваемых со счетно-решающего блока на проектор, обеспечивает возможность их передачи по радио.
Широкое внедрение автоматики в конструкцию современного танка значительно повысило его техническое совершенство.
Создание новых танковых автоматических систем при современном уровне состояния техники не представляет больших технических трудностей.
Повышение технического совершенства танка является только частью решения проблемы улучшения боевых качеств танка. Не менее важным являются обучение и подготовка личного состава танковых войск. Только подготовленный специалист, хорошо овладевший всеми автоматизированными системами, может обеспечить их эффективную работу и тем самым повысить эффективность боевого применения танка в целом.
Источник