
- Коэффициент реактивной мощности трансформаторов
- Потребители реактивной мощности
- Компенсация реактивной мощности в электрических сетях
- Пример расчета реактивной мощности трансформатора
- Коэффициент мощности и гармоники в электросети
- Косинус угла в электротехнике
- Размерности. Что в чём измеряется
- Минусы и плюсы наличия реактивной составляющей
- Как компенсируют реактивную составляющую мощности?
- Отрицательный косинус
- Гармоники питающего напряжения
- PF или DPF?
- Измерения на предприятии
- Анализ полученных результатов обследования
- Рекомендации по уменьшению гармонических составляющих питающего напряжения
- Рекомендации по выбору компенсирующих устройств реактивной мощности
Коэффициент реактивной мощности трансформаторов
Появление термина «реактивная» мощность связано с необходимостью выделения мощности, потребляемой нагрузкой, составляющей, которая формирует электромагнитные поля и обеспечивает вращающий момент двигателя. Эта составляющая имеет место при индуктивном характере нагрузки. Например, при подключении электродвигателей. Практически вся бытовая нагрузка, не говоря о промышленном производстве, в той или иной степени имеет индуктивный характер.
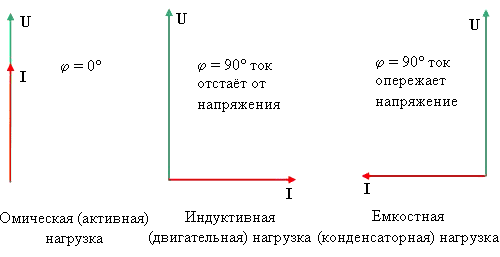
В электрических цепях, когда нагрузка имеет активный (резистивный) характер, протекающий ток синфазен (не опережает и не запаздывает) от напряжения. Если нагрузка имеет индуктивный характер (двигатели, трансформаторы на холостом ходу), ток отстает от напряжения. Когда нагрузка имеет емкостной характер (конденсаторы), ток опережает напряжение.
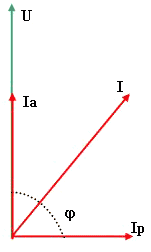
Суммарный ток, потребляемый двигателем, определяется векторной суммой:
- Iа — активный ток
- Iри — реактивный ток индуктивного характера
К этим токам привязаны мощности потребляемые двигателем.
- Р – активная мощность привязана к Iа (по всем гармоникам суммарно)
- Q – реактивная мощность привязана к Iри (по всем гармоникам суммарно)
- A – полная мощность потребляемая двигателем. (по всем гармоникам суммарно)
Реактивная мощность не производит механической работы, хотя она и необходима для работы двигателя, поэтому ее необходимо получать на месте, чтобы не потреблять ее от энергоснабжающей организации. Тем самым мы снижаем нагрузку на провода и кабели, повышаем напряжение на клеммах двигателя, снижаем платежи за реактивную мощность, имеем возможность подключить дополнительные станки за счет снижения тока потребляемого с силового трансформатора.
Параметр определяющий потребление реактивной мощности называется Cos (φ)
- P1гарм — активная мощность первой гармоники 50 Гц
- A1гарм — полная мощность первой гармоники 50 Гц
Таким образом, сos (φ) уменьшается, когда потребление реактивной мощности нагрузкой увеличивается. Необходимо стремиться к повышению сos (φ), т.к. низкий сos (φ) несет следующие проблемы:
- Высокие потери мощности в электрических линиях (протекание тока реактивной мощности);
- Высокие перепады напряжения в электрических линиях (например 330…370 В, вместо 380 В);
- Необходимость увеличения габаритной мощности генераторов, сечения кабелей, мощности силовых трансформаторов.
Из всего вышеприведенного, понятно, что компенсация реактивной мощности необходима. Чего легко можно достичь применением активных компенсирующих установок. Конденсаторы в которых будут компенсировать реактивную мощность двигателей.
Потребители реактивной мощности
Потребителями реактивной мощности, необходимой для создания магнитных полей, являются как отдельные звенья электропередачи (трансформаторы, линии, реакторы), так и такие электроприёмники, преобразующие электроэнергию в другой вид энергии которые по принципу своего действия используют магнитное поле (асинхронные двигатели, индукционные печи и т.п.). До 80-85% всей реактивной мощности, связанной с образованием магнитных полей, потребляют асинхронные двигатели и трансформаторы. Относительно небольшая часть в общем балансе реактивной мощности приходится на долю прочих её потребителей, например на индукционные печи, сварочные трансформаторы, преобразовательные установки, люминисцентное освещение и т.п.
Трансформатор как потребитель реактивной мощности. Трансформатор является одним из основных звеньев в передаче электроэнергии от электростанции до потребителя. В зависимости от расстояния между электростанцией и потребителем и от схемы передачи электроэнергии число ступеней трансформации лежит в пределах от двух до шести. Поэтому установленная трансформаторная мощность обычно в несколько раз превышает суммарную мощность генераторов энергосистемы. Каждый трансформатор сам является потребителем реактивной мощности. Реактивная мощность необходима для создания переменного магнитного потока, при помощи которого энергия из одной обмотки трансформатора передаётся в другую.
Асинхронный двигатель как потребитель реактивной мощности. Асинхронные двигатели наряду с активной мощностью потребляют до 60-65% всей реактивной мощности нагрузок энергосистемы. По принципу действия асинхронный двигатель подобен трансформатору. Как и в трансформаторе, энергия первичной обмотки двигателя – статора передаётся во вторичную – ротор посредствам магнитного поля.
Индукционные печи как потребители реактивной мощности. К крупным электроприемникам, требующим для своего действия большой реактивной мощности, прежде всего, относятся индукционные печи промышленной частоты для плавки металлов. По существу эти печи представляют собой мощные, но не совершенные с точки зрения трансформаторостроения трансформаторы, вторичной обмоткой которых является металл (садка), расплавляемый индуктированными в нём токами.
Преобразовательные установки, преобразующие переменный ток в постоянный при помощи выпрямителей, также относятся к крупным потребителям реактивной мощности. Выпрямительные установки нашли широкое применение в промышленности и на транспорте. Так, установки большей мощности с ртутными преобразователями используются для питания электроизоляционных ванн, например при производстве алюминия, каустической соды и др. Железнодорожный транспорт в нашей стране почти полностью электрифицирован, причём значительная часть железных дорог использует постоянный ток преобразовательных установок.
Компенсация реактивной мощности в электрических сетях
С другой стороны, элементы распределительной сети (линии электропередачи, повышающие и понижающие трансформаторы) в силу особенностей конструктивного исполнения имеют продольное индуктивное сопротивление. Поэтому, даже для нагрузки потребляющей только активную мощность, в начале распределительной сети будет иметь место индуктивная составляющая – реактивная мощность. Величина этой реактивной мощности зависит от индуктивного сопротивления распределительной сети и полностью расходуется на потери в элементах этой распределительной сети.
Действительно, для простейшей схемы:
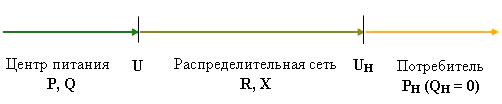
- Р – активная мощность в центре питания,
- Рн – активная мощность на шинах потребителя,
- R – активное сопротивление распределительной сети,
- Q – реактивная мощность в центре питания,
- Qн – реактивная мощность на шинах потребителя.
- U – напряжение в центре питания,
- Uн – напряжение на шинах потребителя,
- Х – индуктивное сопротивление распределительной сети.
В результате, независимо от характера нагрузки, по распределительной сети от источника питания будет передаваться реактивная мощность Q. При двигательном характере нагрузки ситуация ухудшается – значения мощности в центре питания увеличивается и становится равными:
Передаваемая от источника питания к потребителю реактивная мощность имеет следующие недостатки:
- В распределительной сети возникают дополнительные потери активной мощности – потери при транспорте электрической энергии:
Таким образом, транспортировка реактивной мощности по распределительным сетям от центров питания к потребителям превращается в сложную технико-экономическую проблему, затрагивающую как вопросы экономичности так и вопросы надежности систем электроснабжения.
Классическим решением данной проблемы в распределительных сетях является компенсация реактивной мощности у потребителя путём установки у него дополнительных источников реактивной мощности – потребительских статических конденсаторов.
Компенсация реактивной мощности применяется:
- по условию баланса реактивной мощности;
- как важное мероприятие для снижения потерь электрической энергии в сетях;
- для регулирования напряжения.
Источник
Пример расчета реактивной мощности трансформатора
В данном примере нужно будет определить реактивную мощность трансформатора при холостом ходе и при коэффициенте загрузки β=0,5.
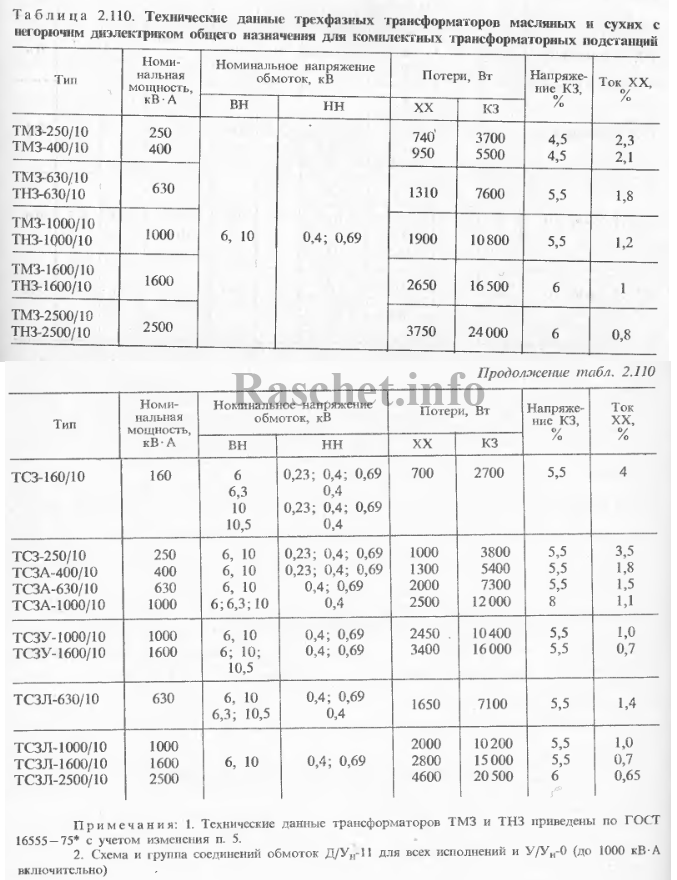
Определить реактивную мощность трансформатора типа ТМЗ-1000-10/0,4 при холостом ходе и при коэффициенте загрузки β=0,5.
Технические характеристики трансформатора принимаем, согласно таблицы 2.110 [Л1., с.221] (ГОСТ 16555-75 (действующий)), также данные технические характеристики можете принимать из каталога завода-изготовителя:
- I% = 1,2% — ток холостого хода, %;
- Uк% = 5,5% — напряжение КЗ, %.
- Sн = 1000 кВА – номинальная полная мощность трансформатора, кВА.
1. Определяем реактивную мощность трансформатора при холостом ходе по выражению 17 [Л2, с.26]:

2. Определим реактивную мощность, зависящую от нагрузки по выражению 18 [Л2, с.27] для номинальной нагрузки:

3. Определяем полную реактивную мощность по выражению 19 [Л2, с.28] для номинальной нагрузки:

4. Определим полную реактивную мощность при загрузке трансформатора на 50% (β=0,5) по выражению 19 [Л2, с.28]:

Как видно из результатов расчетов, реактивная мощность трансформатора состоит из двух частей — реактивной мощности холостого хода Q0, не зависящей от нагрузки, и реактивной мощности рассеяния Qp, зависящей от тока нагрузки. В результате при уменьшении нагрузки трансформатора от номинальной до холостого хода реактивная мощность уменьшается от 100 примерно до 10%.
- Справочник по проектированию электроснабжению. Ю.Г. Барыбина. 1990 г.
- Реактивная мощность (2-е издание) Минин Г.П. 1978 г.
Источник
Коэффициент мощности и гармоники в электросети

Контроллер компенсаторной установки для увеличения cos φ
В прошлой статье я рассказал при исследование качества электроэнергии при помощи анализатора HIOKI. Там я обещал продолжить рассказ и поделиться своими знаниями по таким понятиям, как коэффициент мощности (известный в народе как cos φ) и гармоники питающего напряжения.
Кроме того, расскажу, что такое PF, DPF, и докажу, что косинус и синус – две большие разницы! 🙂
Для примера разберём, как обстоят дела с косинусом и гармониками на предприятии, которое мы обследовали совместно с “ИК Энергопартнер”.
Косинус угла в электротехнике
Кто хочет, почитайте про cos φ в Википедии, а я расскажу своими словами.
Итак, что такое косинус в электротехнике? Дело в том, что есть такое явление, как сдвиг фаз между током и напряжением. Он происходит по разным причинам, и иногда важно знать о его величине. Сдвиг фаз можно измерить в градусах, от 0 до 360.
На практике степень реактивности (без указания индуктивного либо емкостного характера) выражают не в градусах, а в функции косинуса, и называют коэффициентом мощности:
- P – активная мощность, которая тратится на совершение полезной работы,
- S – полная мощность.
Полная мощность является геометрической суммой активной Р и реактивной Q мощностей, поэтому формулу коэффициента мощности можно записать в следующем виде:
Формула коэффициента мощности через активную и реактивную мощности
На самом деле, всё не так просто, подробности ниже.
Легендарный Алекс Жук очень толково рассказал, что такое реактивная мощность, и всё по этой теме:
В видео подробно и доступно изложена вся теория по теме.
Размерности. Что в чём измеряется
Активная мощность Р ⇒ Вт (то, что измеряет домашний счетчик),
Реактивная мощность Q ⇒ ВАР (Вольт · Ампер Реактивный),
Полная мощность S ⇒ ВА (Вольт · Ампер).
Кстати, в стабилизаторах и генераторах мощность указана в ВА. Так больше. Маркетологи знают лучше.
Также маркетологи знают, что на потребителях (например, на двигателях) мощность лучше указывать в Вт. Так меньше.
Минусы и плюсы наличия реактивной составляющей
При питании нагрузки, имеющей только активный характер, сдвиг фаз между током и напряжений равен нулю. Этот случай можно назвать идеальным, при нем можно питающие сети используются полностью, поскольку нет потерь на бесполезную реактивную составляющую.
Реактивная составляющая не так бесполезна. Она формирует электромагнитное поле, нужное для адекватной работы реактивной нагрузки.
В реальной жизни нагрузка, как правило, имеет индуктивный характер (ток отстает от напряжения), и является активно-реактивной. Поэтому всегда, когда говорят о сдвиге фаз и о косинусе, имеют ввиду индуктивную нагрузку.
Основными источниками реактивной составляющей электроэнергии являются трансформаторы и асинхронные электродвигатели.
Чисто реактивная нагрузка бывает только в учебнике. Реально за счет потерь всегда присутствует и активная составляющая тоже.
Реактивная составляющая мощности питания является негативным фактором, поскольку:
- Возникают дополнительные потери в линиях передачи электроэнергии,
- Снижается пропускная способность линий электропередачи,
- Происходит падение напряжения на линиях передачи из-за увеличения реактивной составляющей тока питающей сети,
- Происходит дополнительный нагрев и износ систем распределения и трансформации электроэнергии,
- Возможно появление резонансных эффектов на частотах гармоник, что может вызвать перегрев питающих сетей.
По приведенным причинам необходимо понижать долю реактивной мощности в сети (повышать косинус) – это выгодно и энергоснабжающим организациям, и потребителям с распределенными сетями.
Пример: Для передачи определенной мощности нужен ток 100 А при cos φ = 1. Однако, при cos φ = 0,6 для обеспечения той же мощности нужно будет передать ток 166 А! Соответственно, нужно думать о повышении мощности питающей сети и увеличении сечения проводов…
Реактивная мощность – это часть мощности источника питания, эта мощность была накоплена в магнитном поле, а затем возвращена обратно источнику.
Как компенсируют реактивную составляющую мощности?
Для понижения (компенсации) индуктивного характера реактивной составляющей используют введение емкостной составляющей в нагрузку, которая имеет положительный сдвиг фаз напряжения и тока (ток опережает напряжение). Реализуется это путем подключения параллельно нагрузке конденсаторов необходимой емкости. В результате происходит компенсация, и нагрузка со стороны питающей сети становится активной, с малой долей реактивной составляющей.

Компенсаторная установка на контакторах
Важно, чтобы не происходило перекомпенсации. То есть, даже после компенсации косинус не должен быть выше 0,98 – 0,99, и характер мощности всё равно должен оставаться индуктивным. Ведь компенсация имеет ступенчатый характер (контакторами переключаются трехфазные конденсаторы).

Конденсатор компенсатора реактивной мощности
Однако, для конечного потребителя компенсация реактивной мощности не имеет особого смысла. Польза в её компенсации есть только там, где имеются длинные сети передачи, которые “забиваются” реактивной мощностью, что в итоге снижает их пропускную способность.
Поэтому компенсация реактивной мощности относится к вопросу энергосбережения – она позволяет экономить расход топлива на электростанциях, и выработку бесполезной реактивной энергии, которая в конечном счете преобразуется в тепловую энергию и выбрасывается в атмосферу.
На предприятиях учитывается и активная, и реактивная потребляемые мощности, и при составлении договора оговаривается минимальное значение коэффициента мощности, которое нужно обеспечить. Если косинус упал – включается повышающий коэффициент при оплате.
Отрицательный косинус
Из школьного курса геометрии известно, что cos (φ) = cos (-φ), то есть косинус любого угла будет положительной величиной. Но как же отличить индуктивную нагрузку от емкостной? Всё просто – электрики всех стран условились, что при емкостной нагрузке перед знаком косинуса ставится минус!
В практике пользования прибором анализа напряжения HIOKI у меня были случаи, когда значение косинуса было отрицательным. В последствии выяснилось, что была неправильно включена компенсаторная установка и произошла перекомпенсация. То есть cos φ Коэффициент реактивной мощности Тангенс φ
Часто более удобным является коэффициент реактивной мощности tg φ, который показывает отношение реактивной мощности к активной. Понятно, что при tg φ = 0 достигается идеал cos φ = 1.
Гармоники питающего напряжения
Кроме образования реактивной мощности, на промышленных предприятиях существует такой негативный фактор, как выработка гармоник напряжения питающей сети.
Гармоники – это та часть спектра питающего напряжения, которая отличается частоты промышленной сети 50 Гц. Как правило, гармоники образуются на частотах, кратных основной. Таким образом, 1-я (основная) гармоника имеет частоту 50 Гц, 2-я – 100, 3-я – 150, и так далее.
Для измерения гармоник напряжения существует формула:
Гармоники напряжения – формула расчета
- Кu – коэффициент нелинейных искажений, или THD (Total Harmonic Distortion),
- U(1), U(2), и так далее – напряжение соответствующей гармоники, вплоть до 40-й.
Однако, эта формула не удобна на практике, поскольку не дает представления об уровне каждой гармонике в отдельности. Поэтому для практических целей используют формулу:
Коэффициент каждой гармоники напряжения
- Кu(n) – коэффициент n-й гармонической составляющей спектра напряжения,
- U(n) – напряжение n-й гармоники,
- U(1) – напряжение 1-й гармоники
Таким образом, при измерении мы получим детальное распределение гармоник в спектре питающего напряжения, что позволит провести детальный анализ полученной информации и сделать правильные выводы.
Есть ещё гармоники тока, но там всё гораздо хуже…
На основе увеличения гармоник тока построен прибор для обмана счетчика. Кстати, там Автор прибора довольно убедительно доказал пользу своего изобретения)
PF или DPF?
Здесь надо сделать оговорку. Всё, что я говорил выше про косинус – относится к линейной нагрузке. Это означает, что напряжение и ток, хоть и гуляют по фазе, имеют форму синуса.
Но в реальном мире вся нагрузка не только не активная, но и не линейная. Значит, ток через неё имеет хоть и периодическую, но далеко не синусоидальную форму. Искаженная синусоида означает, что кроме первой гармоники имеются и другие, вплоть до бесконечности.
Вот как обстоят иногда дела:
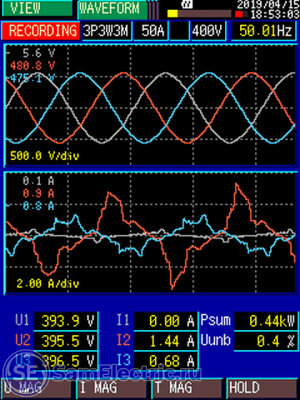
Формы напряжения и тока при нелинейной нагрузке
Гармоники напряжения, тока и мощности
Обычно, когда нагрузка симметричная (трехфазные потребители), за счёт принципов работы все гармоники, кратные 2 и 3, почти отсутствуют. В итоге остаются в основном 5, 7, 11, 13 гармоники, имеющие частоты соответственно частоты 250, 350, 550, 650 Гц.
Поэтому надо понимать, что та теория, что я расписал выше – для идеальных условий (без нелинейных искажений), которых в реале не бывает. Либо, если пренебречь высшими гармониками тока, и взять только первую (50 Гц), что обычно и происходит в жизни.
И если подходить к терминологии строго, то cos φ и PF (Power Factor) – это не одно и то же. PF учитывает также все гармоники напряжения и тока. И с учетом нелинейности реальный PF будет меньше.
Для учета коэффициента мощности в приборе HIOKI есть параметр DPF (Displacement Power Factor, смещённый коэффициент мощности), который учитывает только первую гармонику и равен cos φ.
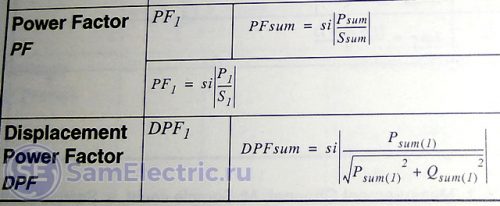
Коэффициенты мощности полный PF и смещённый DPF (для чистого синуса)
В итоге можно сказать, что справедливо выражение:
cos φ = DPF ≤ PF
Измерения на предприятии
При индуктивном характере нагрузки, который наблюдается на практике в большинстве случаев, ток отстает от напряжения (отрицательный сдвиг фаз), что видно на экране прибора HIOKI 3197 (табличные данные) при проведении измерений:
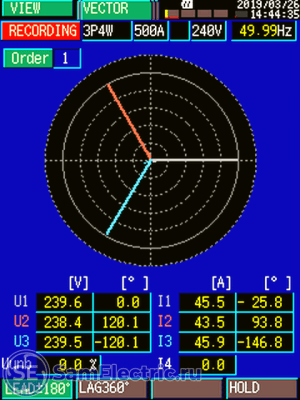
В данном случае видно, что ток отстает от напряжения примерно на 26°.
Из вышеприведенного измерения видно, что при угле отставания тока (сдвиге фаз) 26° cos φ = 0,898. Данный расчет подтверждается измеренным значением.
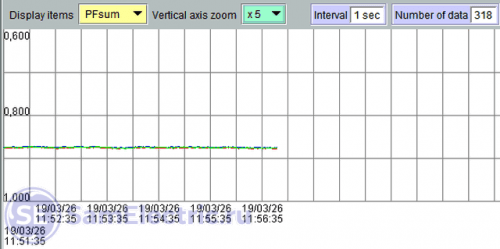
Измерение проводилось в течение около двух часов, за это время оборудование (нагрузка) циклически включалось и выключалось. За всё время измерения коэффициент нелинейных искажений напряжения THD не превысил 1,3% по каждой из фаз.
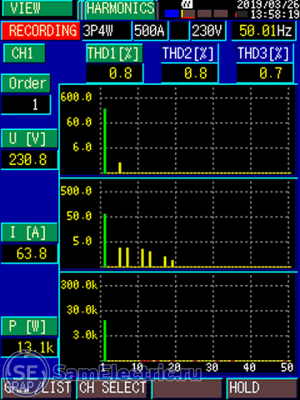
Результаты измерений приведены ниже:
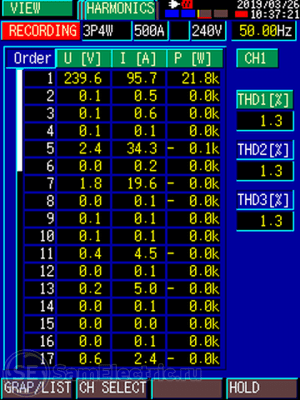
Измеренные гармоники напряжения, тока и мощности
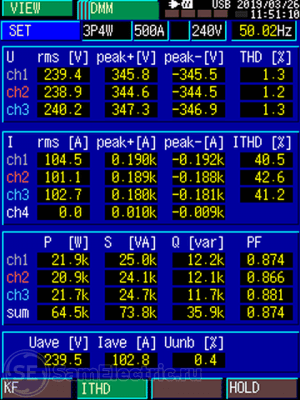
Режим мультиметра – на экране разные параметры
Для проверки проведём расчет по выше приведенной формуле для самых интенсивных гармоник (5, 7, 11):
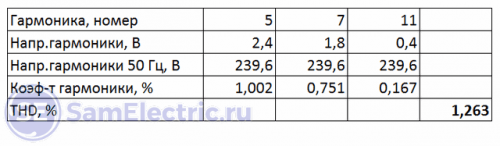
Расчет гармоник напряжения
Как видно, остальные гармоники имеют пренебрежимо малый вес.
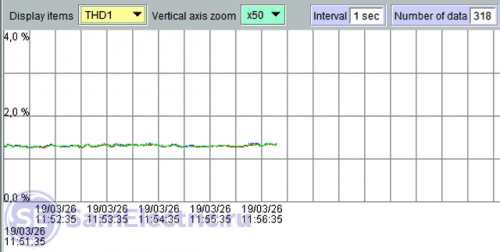
График THD (коэфта нелинейных искажений)
Анализ полученных результатов обследования
На предприятии нужно было выбрать компенсирующую установку для увеличения коэффициента мощности. Но перед её покупкой было решено обратить внимание на гармоники.
Были реальные случаи, когда из-за высокого уровня гармоник напряжения взрывались и загорались конденсаторные установки
В ГОСТ 13109-97 указан допустимый уровень гармонических искажений по напряжению, равный 8%. По проведенным измерениям, этот уровень не превышен. Однако, при увеличении мощности в 5 раз можно ожидать увеличение процента гармоник (THD) в то же количество раз. Следовательно, возможно увеличение коэффициента гармоник с 2,3 % до 11,5 %.
Однако, по рекомендациям производителей для безопасной эксплуатации батарей конденсаторов установок стандартного исполнения уровень THD не должен превышать 2 %. При этом уровень гармоник тока не учитывается и ГОСТом не регламентируется.
Следовательно, необходимо применять совместно с конденсаторными установками фильтры высших частот (фильтрокомпенсирующие устройства).
Рекомендации по уменьшению гармонических составляющих питающего напряжения
Для уменьшения гармоник напряжение рекомендуется сделать следующее:
- На все преобразователи частоты мощностью более 10 кВт в обязательном порядке установить линейные дроссели переменного тока. Лучшим вариантом будет выбор дросселей с высоким импедансом (3-4 %), которые уменьшат уровень гармоник на 15-20%. Кроме того, установка дросселей улучшит надежность и отказоустойчивость преобразователей.
- На преобразователи частоты мощностью более 35 кВт, кроме дросселей переменного тока, установить дроссели постоянного тока для питания звена постоянного тока. Это дополнительно уменьшит выбросы гармоник в питающую сеть на 5-10%.
- Применить пассивные LC-фильтры на вводе питания преобразователей частоты и других нелинейных нагрузок.
Для выполнения приведенных рекомендаций желательно обратиться к инструкциям производителей и специалистам.
Креме того, рекомендуется проверить состояние питающих проводов, кабелей, клемм, переходных сопротивлений силовых соединений фазных и нейтральных проводов, качество соединений заземления корпусов электроприборов и т.д. В результате обследования выявлены преобразователи с отключенным заземлением.
Рекомендации по выбору компенсирующих устройств реактивной мощности
Мощность компенсирующего устройства выбирается исходя из мощности нагрузки, а также существующего и желаемого коэффициентов мощности.
Для расчета параметров можно воспользоваться следующей методикой.
Определить из таблицы коэффициент К, который считается по формулам на основе углов фаз некомпенсированного и компенсированного питания:
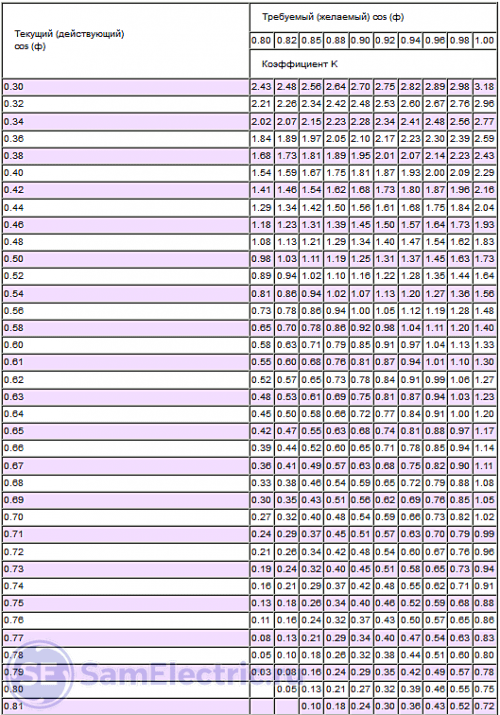
Таблица для определения коэффициента выбора конденсаторов
Например, текущий cosϕ = 0,7, желаемый cosϕ = 0,96. Тогда К = 0,73.
Как я уже говорил, не рекомендуется компенсировать реактивную мощность полностью (до cosϕ = 1), так как при этом возможна перекомпенсация (за счет переменной величины активной мощности нагрузки и других случайных факторов)
Этот тот самый случай, когда к идеалу стремиться не нужно)
Далее, необходимую емкостную мощность конденсаторных батарей определяют по формуле: Qc = КP (ВАр).
Например, в нашем случае, при мощности 1000 кВт полная мощность конденсаторной батареи будет 730 кВАр.
При выборе конденсаторной батареи она должна обладать следующими параметрами (не хуже):
- Перегрузка по току – 1,3 I ном
- Перегрузка по напряжению – 1,1 U ном
- Мощность минимальной ступени – не более 15 кВАр
- Допустимое содержание гармоник напряжения – не менее 20 %
- Частота расстройки фильтра – не более 190 Гц (срез начиная с 4-й гармоники)
- Регулятор реактивной мощности – электронный, с измерением и выдачей всех необходимых параметров
- Коммутация – контакторы, поскольку изменение активной мощности не быстрое
(рекомендации даны поставщиком КУ)
На этом всё. Если есть желание что-то добавить, или поправить меня – как всегда, рад вашим комментариям!
Источник


