
- Как управлять импульсными преобразователями с постоянной частотой переключения. Часть 2
- Контроллеры с управлением по напряжению с улучшенными динамическими характеристиками
- Контроллеры с управлением по току
- Контроллеры для работы в граничном режиме
- Заключение
- Удобное управление током нагрузки с помощью преобразователя напряжения в ток
- Применения
- Анализ
- Заключение
Как управлять импульсными преобразователями с постоянной частотой переключения. Часть 2
Контроллеры с управлением по напряжению с улучшенными динамическими характеристиками
Несмотря на все преимущества, низкая скорость реакции контроллеров с управлением по напряжению все же является весомой причиной для поиска методов улучшения их динамических характеристик. Одним из таких решений является контроль не только выходного напряжения VOUT, но и входного VIN. Принцип регулирования остается тот же, но ширина импульса управления силовыми транзисторами теперь является функцией от двух переменных.

В идеальном случае, зная текущее значение входного и выходного напряжений, можно сформировать сигнал управления таким образом, чтобы соотношение длительностей первого и второго этапов преобразования t1/t2 максимально точно соответствовало текущей ситуации. В аналоговых контроллерах это реализуется путем модуляции пилообразного напряжения, подаваемого на вход ШИМ-компаратора, сигналом, пропорциональным входному напряжению (Рисунок 10). Этот метод получил название Voltage Mode with Voltage Feed Forward (метод управления с упреждением по входному напряжению). Ключевой особенностью данного метода является то, что контроллер начинает изменять состояние системы еще до того, как на выходе начинается переходный процесс. То есть, при правильно рассчитанной и настроенной системе изменение входного напряжения не должно приводить к изменению выходного (в «классическом» методе управления по напряжению изменение входного напряжения всегда приводит к изменению выходного). На практике же все зависит от частотных характеристик датчика входного напряжения и других узлов, реализующих данную функцию.
 | ||
| Рисунок 10. | Схема управления преобразователем с контролем входного напряжения. | |
Конечно, аналоговые схемы являются неидеальными, и при изменении входного напряжения на выходе будет всегда присутствовать некоторый переходной процесс. Однако в любом случае скорость реакции подобных контроллеров на изменение входного напряжения будет намного больше, чем у обычных ШИМ-контроллеров. Идеальной областью применения контроллеров данного типа являются приложения, в которых возможны резкие изменения напряжения питающих шин, например, автомобильная техника, в которой напряжение бортовой сети в момент запуска двигателя может значительно уменьшиться.
Контроллеры с управлением по току
Модуляция пилообразного напряжения на входе компаратора теоретически может решить проблему переходных процессов при изменении входного напряжения. Однако у подобных контроллеров реакция на изменение выходного тока может оставаться недопустимо медленной. Но кто ограничивает модуляцию выходного сигнала генератора только входным напряжением? Очевидно, что, добавив в контроллер соответствующие узлы, можно улучшить и быстродействие при изменении выходного тока. Этот метод получил название «метод с управлением по току» (Current Mode Regulation).
Ключевой особенностью контроллеров с управлением по току является способ формирования пилообразного напряжения на входе ШИМ-компаратора. В этих контроллерах пилообразное напряжение формируется не генератором, а током дросселя, ведь при приложении к индуктивности постоянного напряжения его ток начинает изменяться по линейному закону. В этом случае генератор формирует сигнал, по которому открывается транзистор и начинается первый этап преобразования. А вот заканчивается он после достижения током дросселя некоторого порогового значения VREF.
В «академическом» варианте реализации метода управления по току (Рисунок 11) порог срабатывания компаратора VREF постоянен. Однако на практике так никто не делает, потому что при таком подходе выходное напряжение становится неконтролируемым. Более того, в некоторых схемах силовой части, например, в понижающем преобразователе, при малой разнице между входным VIN и выходным VOUT напряжениями к дросселю прикладывается столь малое напряжение, что его ток может и не достигнуть порогового значения.
 | ||
| Рисунок 11. | Схема управления преобразователем с управлением по току. | |
На практике порог срабатывания ШИМ-компаратора делают зависимым от выходного напряжения VOUT – чем больше выходное напряжение, тем меньше ток выключения транзистора (Рисунок 12). В этом случае регулировка выходного напряжения обеспечивается фактически путем изменения количества преобразуемой мощности – чем меньше выходное напряжение, тем больше энергии будет потреблено из входной цепи на первом этапе преобразования.
 | ||
| Рисунок 12. | Схема управления преобразователем с управлением по току и контролем выходного напряжения. | |
Обратите внимание, что при использовании метода управления по току автоматически обеспечивается защита от перегрузки по току и короткого замыкания выходов. При правильно рассчитанной схеме ток дросселя, а, следовательно, и токи транзистора и диода, просто физически не смогут достичь опасных значений – схема управления закроет транзистор намного раньше.
Метод управления по току нашел широкое применение в контроллерах повышающих, инвертирующих и обратноходовых преобразователей, в которых ток дросселя на первом этапе преобразования будет гарантировано увеличиваться при любом состоянии выхода. Кроме того, при таких схемах силовой части информацию о величине тока дросселя или тока транзистора, которые на первом этапе преобразования одинаковы, можно достаточно легко получить с помощью резистивных датчиков или измеряя падение напряжения на открытом канале MOSFET (Рисунок 13). В понижающих преобразователях, где выводы транзистора и дросселя могут иметь высокий потенциал относительно общего провода, измерение тока дросселя может быть технически затруднено.
 | ||
| Рисунок 13. | Способы получения пилообразного напряжения для контроллеров с управлением по току. | |
Однако, как оказалось, измерять реальный ток дросселя совсем необязательно, ведь если что-то трудно определить, то это можно всегда «придумать». Именно на таком принципе и работают контроллеры с управлением по току и эмуляцией тока дросселя (Emulated Current Mode Regulation). В этих микросхемах пилообразное напряжение на выходе компаратора формируется с помощью специализированного узла, состоящего из управляемого генератора тока и конденсатора (обычно внешнего) CRAMP (Рисунок 14). Выходной ток стабилизатора тока, определяющий скорость нарастания напряжения на конденсаторе CRAMP, пропорционален разнице между входным VIN и выходным VOUT напряжениями. Когда транзистор VT1 закрыт, выходной сигнал с инвертирующего выхода RS-триггера открывает внутренний полевой транзистор, удерживая конденсатор CRAMP в разряженном состоянии.
 | ||
| Рисунок 14. | Упрощенная схема контроллера с эмуляцией тока дросселя. | |
Очевидно, что путем подбора емкости конденсатора CRAMP и коэффициента пропорциональности К можно обеспечить такие параметры пилообразного напряжения на конденсаторе CRAMP, которые будут полностью идентичны току дросселя. Обратите внимание, что в данной схеме улучшается реакция как на изменение входного напряжения, так и на изменение выходного тока. Именно поэтому контроллеры с эмуляцией тока дросселя имеют на сегодняшний день наилучшие динамические характеристики, помехозащищенность и КПД, хотя бы потому, что при таком подходе из силовой части исключается резистивный датчик тока, являющийся источником дополнительных потерь.
Контроллеры с эмуляцией тока дросселя находят свое применение в системах с высоким уровнем помехозащищенности, например, для питания телекоммуникационного оборудования. Этому способствует, во-первых, работа на фиксированной частоте, помехи на которой проще фильтровать, а во-вторых – отсутствие измерений достаточно зашумленных процессов в силовой части, из-за чего снижается уровень шумов в выходном напряжении.
Контроллеры для работы в граничном режиме
А что будет, если контролировать не только максимальное, но и минимальное значение тока дросселя? В этом случае можно начинать новый цикл преобразования в тот момент времени, когда закончится предыдущий, то есть, когда ток дросселя (а, точнее – магнитный поток в его магнитопроводе) станет равным нулю. В этом случае силовая часть преобразователя будет работать в граничном режиме (Boundary Mode). Ключевой особенностью этого режима является максимально полное использование магнитного материала дросселя или, другими словами, дроссель будет иметь минимально возможный при данном уровне мощности объем магнитопровода [5].
Несмотря на то, что сигнал управления силовым транзистором имеет ярко выраженный импульсный характер, его уже нельзя классифицировать как ШИМ-сигнал, поскольку его частота теперь непостоянна – чем меньше выходной ток преобразователя, тем выше частота переключения силовых ключей. Если коэффициент заполнения импульсов управления D в этом режиме останется постоянным (а он все еще зависит от соотношения напряжений между входом и выходом), то такой сигнал уже будет относиться к частотно-импульсной модуляции (ЧИМ) (Pulse-Frequency Modulation, PFM).
 | ||
| Рисунок 15. | Упрощенная схема контроллера, работающего в граничном режиме. | |
Отличительной особенностью преобразователей с ЧИМ-управлением (Рисунок 15) является наивысшая величина удельной мощности (из-за наименьшего размера дросселя) и очень неплохие динамические характеристики, практически идентичные аналогичным параметрам гистерезисных преобразователей. Во многом это связано с отсутствием необходимости дополнительного заряда/разряда дросселя при изменении выходного тока. Обратите также внимание, что в ЧИМ-контроллере генератор может отсутствовать – при таком подходе к управлению он становится не нужен.
Заключение
Управление импульсными преобразователями электрической энергии не является тривиальной задачей. При использовании аналоговых методов управления существует очень много вариантов построения схемы управления, необходимость создания каждого из которых в свое время была обусловлена той или иной практической необходимостью. Все это лишний раз доказывает, что идеального аналогового контроллера не существует, и он вряд ли когда-нибудь будет создан. Каждый метод управления имеет свои достоинства и недостатки, показания и ограничения к применению, поэтому проектирование схемы управления импульсным преобразователем, впрочем, как и проектирование его силовой части, – это всегда компромиссное решение.
До недавнего времени альтернативы аналоговым методам управления не было. И лишь относительно недавно появление высокопроизводительных микроконтроллеров с развитой периферией позволило отказаться от традиционных подходов к управлению и создать первые цифровые контроллеры, которые в принципе, не имеют ограничений, характерных для существующих схем. Однако рассмотрение цифровых методов управления уже выходит за рамки этой статьи.
Источник
Удобное управление током нагрузки с помощью преобразователя напряжения в ток
Данная статья представляет простой способ точного управления током через светодиод (или через типовую резистивную нагрузку).
Как вы, наверное, заметили, в разработке реальной электроники наблюдается определенное преобладание напряжения над током. Что я имею в виду: источники стабильного напряжения распространены и широко доступны, тогда как для создания чего-либо, приближенного к идеальным источникам тока, которые появляются на теоретических принципиальных схемах, требуются определенные усилия. Следовательно, ток, протекающий через нагрузку, обычно определяется амплитудой приложенного напряжения и вольт-амперными характеристиками нагрузки. В случае обычной резистивной нагрузки связь между током и напряжением – это просто сопротивление. Таким образом, ток равен напряжению, деленному на сопротивление. Если сопротивление нагрузки изменяется, ток нагрузки изменяется пропорционально.
Обычно это нормально, но бывают ситуации, в которых мы хотим напрямую задать ток, независимо от характеристик нагрузки. В таких случаях мы можем использовать преобразователь напряжения в ток (ПНТ, или англоязычный термин, VCC, «voltage-to-current converter»), который по сути является источником тока, управляемым напряжением. Мы генерируем сигнал напряжения обычными методами, а затем используем преобразователь напряжения в ток для формирования тока, который зависит только от этого входного напряжения.
Применения
Я не могу придумать слишком много ситуаций, в которых вам нужно было бы использовать преобразователь напряжения в ток для аккуратного управления током через резистивную нагрузку. На самом деле, на данный момент я не могу ничего придумать (не стесняйтесь оставлять комментарии, если у вас есть мысли на этот счет). Линейный характер соотношения тока и напряжения у резистора делает преобразование тока в напряжение несколько избыточным: (прямое) увеличение напряжения, как правило, имеет тот же эффект, что и использование напряжения для увеличения тока.
Однако нет сомнений в том, что преобразователь напряжения в ток – очень удобная схема, когда вы работаете со светодиодами. Светодиод (как и обычный диод) имеет нелинейную вольт-амперную характеристику, и поскольку количество световой энергии, генерируемой светодиодом, определяется током, протекающим через него, напряжение отнюдь не является прямым способом управления яркостью.
Этот вопрос обсуждается в этом техническом обзоре. Если вы прочитаете этот обзор, то увидите, что в качестве преобразователя напряжения в ток я использовал простую схему на операционном усилителе:
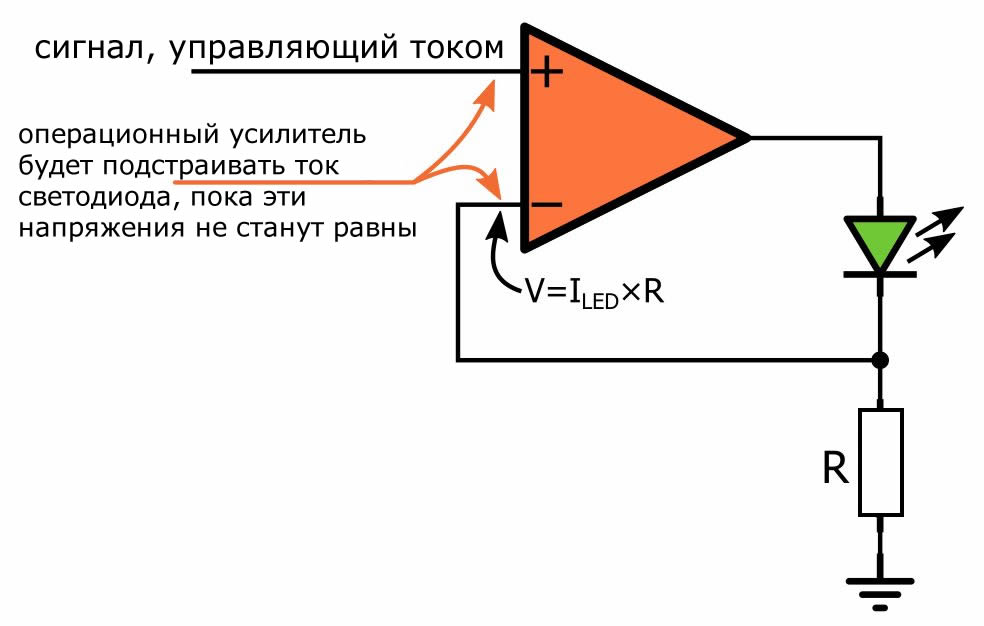 Рисунок 1 – Регулируемый светодиодный драйвер со стабилизацией тока на операционном усилителе
Рисунок 1 – Регулируемый светодиодный драйвер со стабилизацией тока на операционном усилителе
В данной статье я покажу вам другую схему, которая выполняет то же самое. Как они в сравнении между собой? Что ж, в предыдущей схеме используется только один операционный усилитель на светодиод, тогда как в новой используется два, но в наши дни операционные усилители настолько крошечные, что это вряд ли можно считать значительным преимуществом. На самом деле, схема с одним операционным усилителем может даже немного мешать, когда у вас уже есть микросхема с двумя операционными усилителями, потому что вам остается удивительно нетривиальная задача нейтрализовать неиспользуемый усилитель. Я бы не сказал, что одна из этих схем лучше, чем другая, но между ними есть одно важное отличие, которое я объясню в следующем разделе.
Анализ
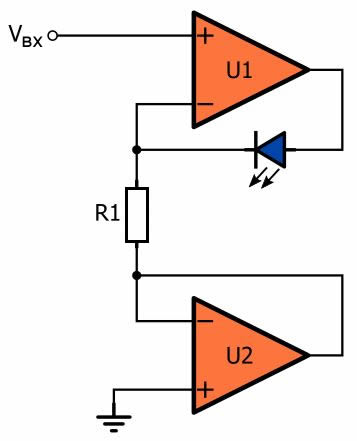 Рисунок 2 – Схема преобразователя напряжения в ток на двух операционных усилителях
Рисунок 2 – Схема преобразователя напряжения в ток на двух операционных усилителях
Прежде чем переходить к графикам моделирования, рассмотрим принцип действия. Данная схема состоит из двух связанных между собой более или менее повторителей напряжения; Я говорю «более или менее», потому что один из повторителей имеет диод в цепи обратной связи. Нижний повторитель в качестве входного напряжения использует потенциал «земли», поэтому выходное напряжение и, следовательно, напряжение на инвертирующем входе равно 0 В. Это означает, что на нижнем выводе R1 всегда будет на 0 В.
Из упрощения «виртуального короткого замыкания» мы знаем, что два входа операционного усилителя будут иметь одинаковое напряжение. Это означает, что напряжение на верхнем выводе R1 равно управляющему напряжению, и, следовательно, ток через R1 всегда равен Vупр/R1. Но что является источником этого тока? Его, конечно, нельзя получить через инвертирующий вход U1, и единственная другая возможность – это выход U1. Таким образом, ток, текущий с выхода U1, всегда равен Vупр/R1, и, следовательно, ток через светодиод всегда равен Vупр/R1. То же самое было бы применимо, если бы светодиод был заменен резистором или даже катушкой индуктивности. Другими словами, эта схема используется для точного управления током, протекающим через компонент, помещенный в цепь обратной связи U1.
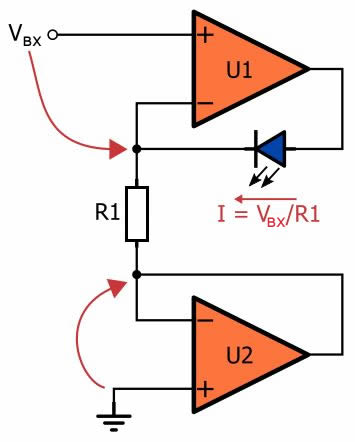 Рисунок 3 – Определение величины силы тока через светодиод
Рисунок 3 – Определение величины силы тока через светодиод
Основное отличие этой схемы от схемы на одном операционном усилителе заключается в следующем: схема с двумя операционными усилителями является дифференциальной, тогда как схема с одним операционным усилителем является несимметричной. В схеме с одним операционным усилителем входное напряжение всегда измеряется относительно земли. Схема с двумя операционными усилителями позволяет управлять током нагрузки с помощью дифференциального напряжения; это показано на следующей принципиальной схеме, где неинвертирующий вход U2 стал вторым входом схемы и теперь не подключен напрямую к земле.
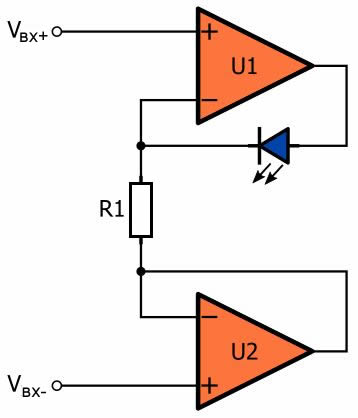 Рисунок 4 – Управление выходным током преобразователя с помощью дифференциального напряжения
Рисунок 4 – Управление выходным током преобразователя с помощью дифференциального напряжения
Ниже показана реализация в LTspice, за которой следуют два графика. На первой диаграмме вы можете увидеть только одну кривую, потому что два графика (входное напряжение и ток нагрузки) полностью перекрываются. На второй диаграмме я поместил два графика в отдельных системах координат. Эти графики подтверждают, что ток нагрузки точно соответствует входному напряжению, несмотря на сложные вольт-амперные характеристики диода, и что соотношение между входным напряжением и током нагрузки действительно представляет собой (приятно простое) уравнение, объясненное выше, т.е. Iнагр = Vвх/R1 .
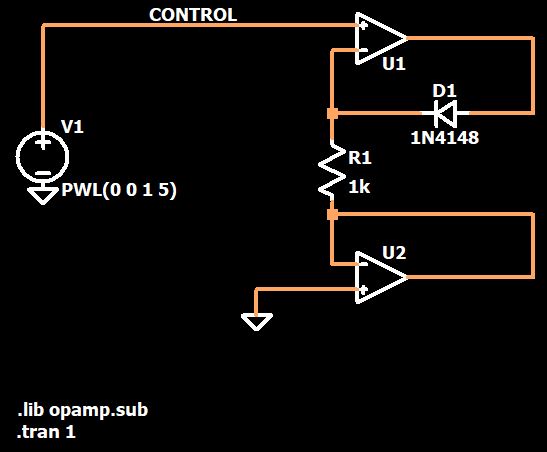 Рисунок 5 – Схема преобразователя напряжения в ток на двух операционных усилителях в LTspice
Рисунок 5 – Схема преобразователя напряжения в ток на двух операционных усилителях в LTspice 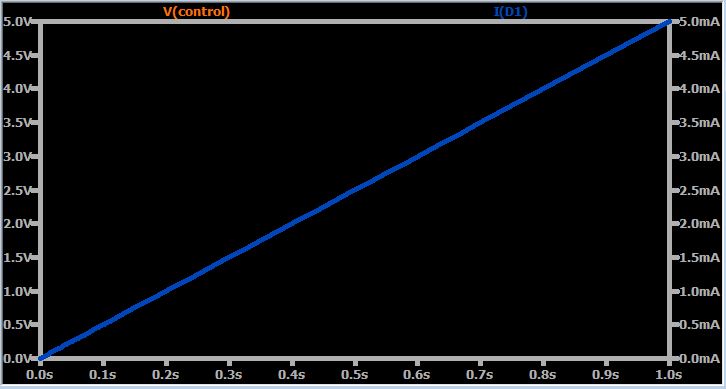 Рисунок 6 – Временные графики входного напряжения и выходного тока в одной системе координат
Рисунок 6 – Временные графики входного напряжения и выходного тока в одной системе координат 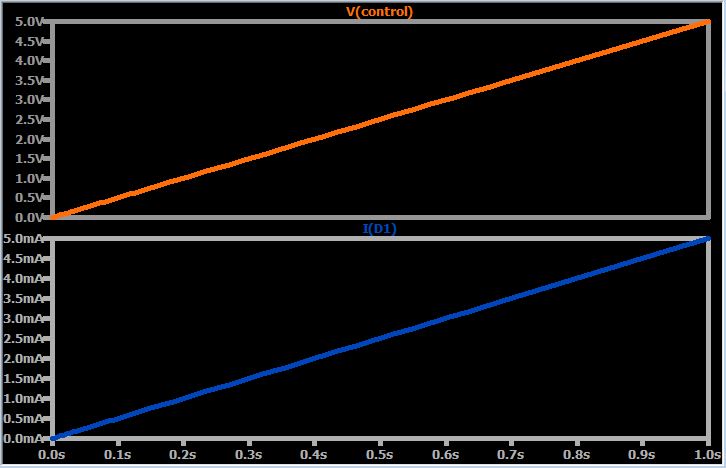 Рисунок 7 – Временные графики входного напряжения и выходного тока в разных системах координат
Рисунок 7 – Временные графики входного напряжения и выходного тока в разных системах координат
Заключение
В данной статье представлена и объяснена простая, но эффективная схема использования сигнала напряжения для точного управления током через нагрузку. Эта схема более универсальна, чем схема, которую я использовал ранее, потому что она принимает дифференциальное входное напряжение. Однако помните, что не у каждого операционного усилителя есть входы «rail-to-rail» («от шины к шине»); если отрицательное напряжение питания равно 0 В, некоторые операционные усилители не подойдут для версии преобразователя напряжения в ток с несимметричным входом (т.е. соединенным с землей), обсуждаемой в данной статье.
Если вы хотите сэкономить немного времени, вы можете загрузить мою схему LTspice по ссылке ниже.
Источник