
- Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
- Пусковой момент асинхронного двигателя
- Пусковой момент асинхронного двигателя
- Пусковой момент и его численное значение
- Какую роль играет пусковой момент
- Пути ограничения пускового тока
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U 2 1. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f(s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора
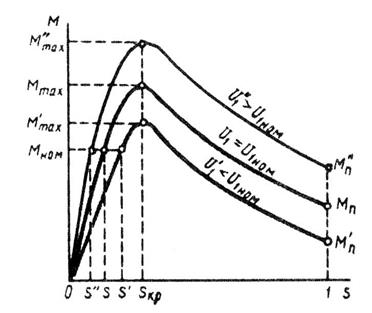
Рис. 13.5. Влияние напряжения на вид механической
характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном . Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
M / max = 0,7 2 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2 , то при понижении напряжения на 30% перегрузочная способность двигателя λ’ = М’max /Мном = 0,49 Mmax /Mном = 0,49  2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 . Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2‘. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2‘ до некоторого значении. На рисунке это соответствует сопротивлению г2‘ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2‘ пусковой момент уменьшается.
Анализ графиков М = f(s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2‘ сопровождаются изменениями частоты вращения: с увеличением r2‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
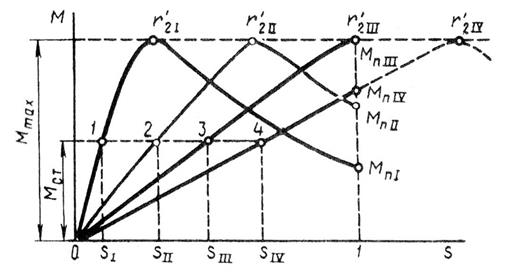
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических
характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2‘ . При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I /2 2) .Выбранное значение г2‘ должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f(U1) и М = f(r2‘) имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
Источник
Пусковой момент асинхронного двигателя
Вращающий момент, развиваемый на валу асинхронного электродвигателя в условиях нулевой скорости вращения ротора (когда ротор еще неподвижен) и установившегося в обмотках статора тока, — называется пусковым моментом асинхронного двигателя.
Пусковой момент иногда называют еще моментом трогания или начальным моментом. При этом подразумевается, что напряжение и частота питающего напряжения приближены к номиналу, причем соединение обмоток выполнено правильно. В номинальном режиме работы данный двигатель будет работать именно так, как предполагали разработчики.
Численное значение пускового момента

Пусковой момент вычисляется по приведенной формуле. В паспорте электродвигателя (паспорт предоставляется производителем) указана кратность пускового момента.
Обычно значение величины кратности лежит в пределах от 1,5 до 6, в зависимости от типа двигателя. И при выборе электродвигателя для своих нужд, важно убедиться, что пусковой момент окажется больше статического момента планируемой проектной нагрузки на валу. Если это условие не соблюсти, то двигатель попросту не сможет развить рабочий момент при вашей нагрузке, то есть не сможет нормально стартонуть и разогнаться до номинальных оборотов.
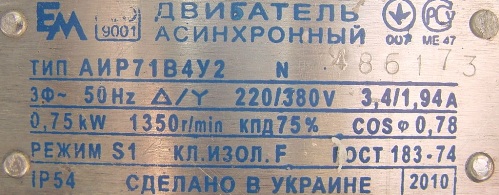
Давайте рассмотрим еще одну формулу для нахождения пускового момента. Она будет вам полезной для теоретических расчетов. Здесь достаточно знать мощность на валу в киловаттах и номинальные обороты, — все эти данные указаны на табличке (на шильдике). P2-номинальная мощность, F1-номинальные обороты. Итак, вот эта формула:

Для нахождения P2 применяют следующую формулу. Здесь необходимо учесть скольжение, пусковой ток и напряжение питания, все эти данные указаны на шильдике. Как видите, все довольно просто. Из формулы очевидно, что пусковой момент в принципе можно повысить двумя путями: увеличением стартового тока или повышением питающего напряжения.

Попробуем, однако, пойти наиболее простым путем, и рассчитаем значения пусковых моментов для трех двигателей серии АИР. Воспользуемся параметрами кратности пускового момента и величинами номинального момента, то есть пользоваться будем самой первой формулой. Результаты расчетов приведены в таблице:
| Тип двигателя | Номинальный момент, Нм | Отношение пускового момента к номинальному моменту | Пусковой момент, Нм |
| АИРМ132М2 | 36 | 2,5 | 90 |
| АИР180 S2 | 72 | 2 | 144 |
| АИР180М2 | 97 | 2,4 | 232,8 |
Роль пускового момента асинхронного электродвигателя (пусковой ток)
Часто двигатели включают напрямую в сеть, осуществляя коммутацию магнитным пускателем: на обмотки подается линейное напряжение, создается вращающееся магнитное поле статора, оборудование начинает работать.
Бросок тока в момент старта в данном случае неизбежен, и он превышает номинальный ток в 5-7 раз, причем длительность превышения зависит от мощности двигателя и от мощности нагрузки: более мощные двигатели стартуют дольше, их обмотки статора дольше принимают токовую перегрузку.
Маломощные двигатели (до 3 кВт) легко переносят данные броски, и сеть так же легко выдерживает эти незначительные кратковременные всплески мощности, ибо у сети всегда есть некоторый мощностный резерв. Вот почему небольшие насосы и вентиляторы, станки и бытовые электроприборы обычно включают напрямую, не заботясь особо о токовых перегрузках. Как правило обмотки статоров двигателей оборудования такого рода соединяются по схеме «звезда» из расчета на трехфазное напряжение 380 вольт или «треугольник» — для 220 вольт.
Если же вы имеете дело с мощным двигателем на 10 и более кВт, то включать напрямую такой двигатель в сеть нельзя. Бросок тока в момент пуска необходимо ограничить, иначе сеть испытает значительную перегрузку, что может привести к опасной «нештатной просадке напряжения».
Пути ограничения пускового тока
Наиболее простой способ ограничения пускового тока — пуск при пониженном напряжении. Обмотки просто переключаются с треугольника на звезду в момент пуска, а затем, когда двигатель набрал какие-то обороты — обратно на треугольник. Переключение осуществляется через несколько секунд после старта с помощью реле времени, например.
В таком решении пусковой момент также понижается, причем зависимость квадратичная: при снижении напряжения в будет в 1,72 раза, момент снизится в 3 раза. По этой причине пуск при пониженном напряжении подходит для такого оборудования, где пуск возможен с минимальной нагрузкой на валу асинхронного двигателя (например пуск многопильного станка).
Мощным нагрузкам, например ленточному конвейеру, необходим другой способ ограничения пускового тока. Здесь лучше подойдет реостатный метод, позволяющий снизить пусковой ток без уменьшения крутящего момента.
Такой способ очень подходит асинхронным двигателям с фазным ротором, где реостат удобно включается в цепь обмотки ротора, и регулировка рабочего тока осуществляется ступенчато, получается очень плавный пуск. С помощью реостата тут же можно регулировать и рабочую скорость двигателя (не только в момент запуска).
Но наиболее эффективным способом безопасного пуска асинхронных двигателей является все же пуск посредством частотного преобразователя. Величину напряжения и частоту регулирует сам преобразователь автоматически, создавая оптимальные условия двигателю. Обороты получаются стабильными, при этом броски тока принципиально исключены.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Пусковой момент асинхронного двигателя

Пусковым моментом асинхронного двигателя называют вращающий момент, который развивается на валу асинхронного электрического двигателя, когда ротор остается неподвижным, а статор тока установлен в обмотках.
Если в специализированной литературе встречаются термины «начальный момент», «начальный пусковой момент асинхронного двигателя» или «момент трогания», то речь тоже идет о пусковом моменте. Обязательно нужно следить за правильностью выполнения обмоток, причем подразумевается, что частота питающего напряжения, как и само напряжение, будут приближены к номинальному значению. Только в номинальном режиме асинхронный двигатель сможет работать непосредственно так, как задумано инженерами.
Пусковой момент и его численное значение

Определить пусковой момент асинхронного двигателя можно, используя специальную формулу. Кратность же пускового момента асинхронного двигателя можно найти в паспорте устройства, такой документ обязательно должен предоставляться производителем. С этими данными формулу пускового момента асинхронного двигателя очень просто рассчитать.
В зависимости от модели двигателя меняется величина кратности. Встречаются изделия, в которых этот показатель составляет от 1,5 до 6. При покупке необходимо убедиться, что значение пускового момента больше, чем статический момент планируемой проектной нагрузки на валу. Если, выбирая двигатель, вы обнаружили несоответствие, то такой аппарат не сможет развивать необходимый рабочий момент и выполнять нужную нагрузку. Он просто будет не в состоянии должным образом запуститься, а после и разогнаться до номинальных оборотов. Максимальный пусковой момент асинхронного двигателя должен соответствовать потребностям пользователя.
Для нахождения пускового момента существует и еще одна формула. Ее следует использовать при выполнении теоретических расчетов. Чтобы воспользоваться формулой, необходимо знать показатели номинального оборота и мощности на валу. На шильдике (табличка с данными) устройства указываются все эти параметры. В формуле P2 –номинальная мощность, а F1 – номинальные обороты. Формула выглядит следующим образом:

Чтобы найти P2, необходимо применить уже отдельную формулу. Здесь пусковой момент асинхронного двигателя зависит от напряжения. Важно учитывать параметры скольжения, пускового тока и напряжения питания. Все эти величины тоже обнаруживаются на шильдике. Расчеты не представляют особой сложности. И формула наглядно показывает, что для увеличения пускового момента асинхронного двигателя можно воспользоваться двумя методиками: повысить питающее напряжение или увеличить стартовый ток.

Для наглядности предлагаем произвести расчет значений пусковых моментов для трех аппаратов из серии АИР. Воспользоваться нужно самой первой формулой, для которой необходимы величины номинального момента и параметры кратности пускового момента. Результаты вычислений представлены в табличке:
| Тип двигателя | Номинальный момент, Нм | Отношение пускового момента к номинальному моменту | Пусковой момент, Нм |
| АИРМ132М2 | 36 | 2,5 | 90 |
| АИР180S2 | 72 | 2 | 144 |
| АИР180М2 | 97 | 2,4 | 232,8 |
Какую роль играет пусковой момент

Встречаются ситуации, когда двигатели подключают непосредственно к сети, а коммутацию производят за счет обычного магнитного пускателя. Для этого линейное напряжение подается на обмотки, образуется вращающееся магнитное поле статора, за счет чего оборудование начинает работать.
В этом случае не избежать броска тока, который по своей величине превысит номинальный ток в 5-7 раз. И чем мощнее двигатель и выше нагрузка, тем большей будет и длительность такого превышения. Более мощные моторы демонстрируют продолжительный старт, а обмотки статора в них принимают токовую перегрузку дольше.
Двигатели малой мощности, не превышающей 3 кВт, могут с легкостью перенести такие перепады. Сеть тоже вполне достойно справляется с кратковременными бросками мощности, поскольку у сети в любом случае присутствует некий мощностной резерв. Это объясняет, почему мелкие бытовые электроприборы, а также небольшие станки, вентиляторы и насосы подсоединяют напрямую, не беспокоясь о том, что они подвергаются перегрузкам. Обмотки статоров в двигателях маломощного оборудования соединяются «звездой», если расчет идет на 3-фазное напряжение в 380 вольт или «треугольником», когда речь идет о 220 вольтах.
Но если двигатель более мощный, с показателем в 10 и больше кВт, то его недопустимо включать в сеть напрямую. Нужно ограничить бросок тока, иначе можно спровоцировать существенную перегрузку, которая приведет к опасным последствиям.
Пути ограничения пускового тока

Самый простой способ убрать лишний пусковой ток заключается в запуске оборудования на пониженном напряжении электродвигателя. Для этого конструкция предусматривает переключение обмотки с «треугольника» на «звезду» непосредственно в момент запуска. Когда же двигатель наберет некоторые обороты, обмотка переключается обратно на «треугольник». Всего несколько секунд требуется для погашения ненужного всплеска и переключения. В устройствах это реализуется за счет реле времени или иных приспособлений.
Если используется это решение, то пусковой момент также понижается. И здесь можно наблюдать квадратичную зависимость: когда напряжение уменьшится в 1,7 раза, то и момент снизится в 3 раза. Именно поэтому пуск на пониженном напряжении можно использовать лишь оборудования, в котором пуск возможен только с минимальной нагрузкой на валу двигателя асинхронного типа. Ярким примером может служить пуск многопильного станка.
Если же речь идет о мощных нагрузках, к примеру, присущих ленточному конвейеру, то указанный выше способ ограничения пускового тока не подходит. Лучше применять реостатный метод. Он дает возможность уменьшить пусковой ток без ущерба для крутящего момента. Именно этот способ можно назвать наиболее подходящим для асинхронных электродвигателей, снабженных фазным ротором. Тут удобно включается реостат в цепь обмотки ротора, а регулировка рабочего тока производится ступенчато, обеспечивая плавный пуск. А за счет реостата можно отрегулировать и рабочую скорость в двигателе, причем это характерно не только для момента запуска.
Самым же эффективным методом для безопасного запуска электродвигателей асинхронного типа можно смело назвать пуск через частотный преобразователь. Показатели напряжения и частоты здесь регулируются самим преобразователем в автоматическом режиме, за счет чего двигатель работает в оптимальных для себя условиях. Так удается достичь стабильности в оборотах, но полностью исключить броски тока.
Источник