
Применение локальной шины LIN в современном автомобиле
В этой статье автор рассматривает алгоритм работы однопроводной шины LIN (Local Interconnect Network — локальная коммутационная сеть) — интерфейса, который присутствует в любом современном автомобиле.
Развитие прогресса в автомобилестроении неуклонно ведет к повышению требований к управлению, возрастает объем функций, на совершенно новый уровень переходит информационная составляющая о работе и поведении автомобиля. В связи с этим бортовая электроника наращивает свое присутствие в современном автомобиле. По статистике, количество блоков управления в нем за последние 15 лет увеличилоь более чем в пять раз, и эта тенденция сохраняется. Потребителю хочется иметь полный контроль над любимым авто и над дорогой. Последние модели могут обойтись в сложной ситуации без водителя и принять решение согласно заложенной программе. Такие вопросы, как парковка или проезд по размытому участку сельской дороги машина может решить самостоятельно, без участия человека. С каждым годом все реальнее и ближе введение элементов автопилотирования, применяемых в авиации.
Увеличившееся число электронных модулей вынудило, в свою очередь, находить и внедрять новые технологии передачи данных между отдельными блоками управления. В вычислительной технике они уже давно существовали, поэтому оставалось только перенести опыт их использования и стандартизировать применительно к автомобилю. Сначала произошло внедрение шины данных CAN. У ведущих проиводителей это случилось в середине 90-х годов. Однако пропускной способности и скорости этой технологии хватило примерно лет на 10, после чего встал вопрос о дальнейшем развитии системы передачи информации. Особенно заметны проблемы стали после повсеместного применения инормационно-развлекательного контента. Вместе с ним пришли и технологии, применяемые в кабельном телевидении и в современных системах связи, включая диагностику и сервис.
В итоге к завоевавшей уважение и известной шине CAN на сегодня добавились:
— шина LIN (однопроводная шина);
— шина MOST (оптоволоконная шина) (рис. 1);
— беспроводная шина Bluetooth™.
Рис. 1. Оптоволоконная шина MOST в современном автомобиле
В этой статье мы рассмотрим алгоритм работы однопроводной шины LIN. Local Interconnect означает, что все блоки управления данной сети находятся в пределах одного условно ограниченного модуля (к примеру: багажника, крыши, мотора вентилятора и др.).
Она может обозначаться еще и как «локальная подсистема». Обмен данными между отдельными системами шин LIN одного автомобиля осуществляется через соответствующий блок управления по шине данных CAN. Говоря о шине LIN, необходимо понимать, что речь идет об однопроводной шине. Площадь поперечного сечения провода составляет 0,35 мм 2 . Экранирование кабеля не является обязательным условием. Цвет изоляции может быть различным, в автомобилях «Ауди» он фиолетовый. Алгоритм работы шины LIN интуитивно понятен и от того прост для освоения. Он позволяет осуществлять обмен данными между одним блоком управления LIN, его называют Master, и подчиненными блоками Slave.
Блок управления LIN Master
Напомним, что блоки управления LIN Master сопряжены с шиной данных CAN и выполняют мастер-функции управления определенной шиной LIN.
Приведем основные функции блока LIN Master:
— контролирует передачу данных в шине LIN и скорость обмена;
— отправляет посылки-телеграммы в шину LIN. В его ПО заложен цикл, какому подчиненному блоку, когда, как часто и какие посылки-телеграммы отправлять;
— выполняет функцию сопряжения подчиненных блоков шины LIN с шиной данных CAN, так как является единственным блоком управления отдельной шины LIN, подключенным к шине данных CAN (рис. 2);
Рис. 2. Применение шины LIN в современном автомобиле
— обеспечивает процесс диагностики подключенных блоков управления LIN Slave (рис. 3).
Рис. 3. Блоки управления LIN Slave
Блоки управления LIN Slave
Подключенные или подчиненные блоки управления LIN Slave в рамках отдельной системы шины данных LIN выполняют функции контроля и управления работой отдельных устройств, например, мотора вентилятора, привода люка в крыше, а также датчиков и исполнительных механизмов (датчик уклона, ручного тормоза, сирена противоугонной сигнализации и т.д.). Датчики измеряют или контролируют какие-либо величины и передают сигнал в аналоговом виде. Блок управления LIN Slave анализирует и преобразовывает принятые параметры в цифровую форму. Затем эти величины передаются по шине LIN в виде цифрового сигнала.
Блок управления LIN Master опрашивает исполнительные устройства (посылает телеграмму), получает информацию о состоянии, что позволяет провести сравнительный анализ между фактическим и расчетным состоянием и влиять на работу исполнительных механизмов через блоки управления LIN Slave. Каждый блок LIN Slave обладает электронными или электромеханическими функциями и имеет свой адрес. Адрес передается в заголовке посылки-телеграммы и его опознает блок, за которым закреплен этот адрес, иными словами происходит идентификация обращения.
Технически интерфейс LIN реализуется просто и надежно. Сопряжение блоков LIN Slave с управляющим блоком LIN (Master) осуществляется по однопроводной линии с помощью одноконтактного разъема, одного на всех.
Рассмотрим алгоритм передачи данных.
Скорость шины LIN примерно в 5 раз меньше скорости шины CAN и составляет до 20 кбит/сек. Реализовано это для того, чтобы не перегружать шину CAN. Цифровые сигналы, как это давно уже принято в вычислительной и связной технике, передаются высоким и низким уровнями сигналов. Размах сигналов зависит от уровня напряжения питания. В автомобиле используется бортовое напряжение 12 В (14,4 В при работе генератора). Отсюда и уровни сигналов шин — от 0 до 12 В.
Если по шине LIN не происходит передача телеграмм или передается «рецессивный» бит, то уровень сигнала будет около 12 В, если будет передан «доминантный» бит, то передатчик замыкает на «массу» и уровень будет близок к нулю (рис. 4) Последовательность доминантных и рецессивных битов и составляет телеграмму, с помощью которой блок управления LIN Master обменивается с блоками LIN Slave. В различных модификациях приемопередатчиков (трансиверов) внешний вид рецессивных и доминантных уровней может иметь отличия.
Рис. 4. Осциллограмма сигналов шины LIN
Чтобы устранить влияние различных факторов на качество работы шины LIN, при передаче возможны отклонения от заданных уровней (0 и 12 В) не более чем на 2 В (рис. 5).
Рис. 5. Диапазон напряжений при передаче
Уровень приема еще более защищен и сигналы принимаются амплитудой с отклонением до 40% от заданных (рис. 6).
Рис. 6. Диапазон напряжений при приеме
Опишем непосредственно «телеграммы», с помощью которых происходит общение блоков по шине LIN.
Блок управления LIN Master посылает телеграмму блоку LIN Slave и в заголовке передается код операции — что именно надо сделать. Например, необходимо переслать показания датчиков, измеряющих скорость вращения вентилятора, т.е. переслать информацию о величине скорости, которую данные датчики измеряют. Это первый видтелеграммы — опросный.
В ответ блок LIN Slave пересылает телеграмму с измеренными величинами. Это второй вид телеграммы — ответный.
Блок управления LIN Master анализирует показания датчиков, пересланные от блока LIN Slave, и посылает телеграмму с указаниями изменить скорость вращения. Это третий вид телеграммы — управляющий.
По такому алгоритму и происходит обмен между блоками, сопряженными шиной LIN.
Реализация этого алгоритма начинается с того, что блок LIN Master с определенным циклом обращается к блокам LIN Slave, посылая заголовок телеграммы (рис. 7). Цикл обращения установлен программным обеспечением и может изменяться в зависимости от ситуации, режимов работы автомобиля и других факторов.
Рис. 7. Осциллограмма заголовка телеграммы
Обращение относится ко всему возможному оборудованию, если каких-либо устройств нет на шине LIN, а это зависит от количества опций, которое оплачено владельцем, то обмен с отсутствующими блоками не состоится. Иными словами, на свой запрос к некоторым возможным блокам LIN Slave останется без ответа, ибо эти блоки просто отсутствуют в данной модификации. Это обстоятельство не влияет на работу. Если данные блоки будут поставлены, алгоритм работы с ними восстановится, напомним, что их может быть до 16-ти на каждый блок управления LIN Master.
Теперь подробнее о самой реализации взаимодействия.
Как было сказано ранее, блок управления LIN Master посылает с разной периодичностью, зашитой в программном обеспечении, опросные телеграммы. Каждая телеграмма содержит заголовок (Header) и собственно текст, состоящий из переданных данных.
Заголовок состоит из четырех частей (рис. 7):
Пауза в синхронизации (synch break)
Представляет собой не менее 13-ти битов, пересылаемых доминантным уровнем, что в вычислительной технике расценивается как передача не менее 13-ти «нулей». Блоки LIN Slave имеют возможность настроиться на прием телеграммы, ибо в тексте самой телеграммы не может быть подобной информации и столь долгая передача только доминантного уровня подсказывает блокам, что после этого поля последуют другие.
Окончание синхронизации (synch delimiter)
Эта часть передается рецессивным уровнем (около 12 В), что соответствует передаче «единицы» и сообщает блокам LIN Slave о том, что пауза закончилась и необходимо приготовиться к синхронизации.
Поле синхронизации (synch field)
Эта часть заголовка служит для непосредственной настройки блоков LIN Slave на работу с блоком управления LIN Master. Поле состоит из последовательности доминантных и рецессивных битов, то есть последовательности «нулей» и «единиц». Таким образом синхронизируется частота, на которой блоки LIN Slave должны работать по шине LIN, принять поле идентификатора и последующие за ним данные.
Это поле состоит из восьми бит. В первых 6-ти битах передаются адрес блока LIN Slave для его опознавания (идентификации) и количество полей для передачи данных, отведенных для ответа (от 0 до 8). Два оставшихся бита предназначены для передачи контрольной суммы. Контрольная сумма вычисляется согласно определенному алгоритму и необходима для того, чтобы избежать ошибок в передаче. При совпадении контрольной суммы оборудование считает что информация передана корректно.
Получая информацию о количестве полей для передачи данных (Datafields), блок LIN Slave передает данные о состоянии сопряженных с ним датчиков, например, о скорости вращения вентилятора. Каждое поле — это 10 бит информации, из них первый бит — доминирующий стартовый, далее передается байт (8 бит) информации и заканчивается поле стоповым рецессивным битом (рис. 8). Стартовый и стоповый биты служат для синхронизации при передаче данных.
Рис. 8. Осциллограмма ответа
В свою очередь, блок управления LIN Master принимает информацию, в нашем примере — это скорость вращения вентилятора. Если скорость вращения удовлетворяет ситуации и не требуется ее коррекция, то блок управления LIN Master через некоторое время (определяется ПО) снова пошлет запрос в виде телеграммы для контроля за работой данного блока LIN Slave.
Если необходимо изменить скорость вращения вентилятора, то блок управления LIN Master посылает телеграмму с нужной скоростью вращения, и блок LIN Slave, получив указание, изменяет скорость вентилятора (рис. 9).
Рис. 9. Регулировка скорости вращения вентилятора
Напомним, что опрос блоков LIN Slave осуществляется с частотой, заложенной в программном обеспечении, но при изменении ситуации эта частота может меняться. Факторов к изменению частоты обращения к блокам LIN Slave тем больше, чем лучше ПО и чем современнее бортовое оборудование автомобиля.
Комплектация современного автомобиля может быть разной, и если блок управления LIN Master имеющий полное ПО, посылает запрос несуществующему блоку LIN Slave, то заголовки телеграмм возвращаются к LIN Master без ответа (рис. 10). Это не мешает алгоритму работу шины LIN и при установке соответствующего блока LIN Slave незамедлительно начинается его опрос и контроль работы со стороны блока управления LIN Master.
Рис. 10. Осциллограммы с заголовками телеграмм без ответов
Алгоритм работы шины LIN постоянно находится под контролем блока управления LIN Master и потому защищен от несанкционированного внешнего доступа (от блоков, размещенных за наружной обшивкой автомобиля), что и позволяет размещать блоки LIN Slave, которые работают только на выполнение команд от LIN Master и не требуют передачи данных на внешних деталях машины. Вмешательство извне затруднено, поэтому, к примеру, блок управления открытием гаражных ворот может располагаться в переднем бампере.
Диагностика шины LIN и всех блоков, сопряженных с этой линией, осуществляется через диагностический разъем. При тестировании происходит имитация обмена между блоками, анализируются ответы от блоков LIN Slave и задающие команды от LIN Master.
1. Новые технологии обмена данными — LIN, MOST, BluetoothTM. Программа самообучения 286.
Автор: Михаил Митин (г. Москва)
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Источник
Напряжение шины lin проверка
Проверь Есть Ли .
1) Масса На Генераторе !
2) Возбуждения На Реле Зарядки !
3) Не износились Ли Счётки !
4) Не Пробивает ли Якарь и Обмотка можВитков и на корпус !
5) Нет Ли Выробатки НА ланэлях Якоря !!
При Наличи Всех Этих Факторов Будет Зарядка Без Вариантов .
а так нужен осцилограф или тестер лин бас шины
Проверь Есть Ли .
1) Масса На Генераторе !
2) Возбуждения На Реле Зарядки !
3) Не износились Ли Счётки !
4) Не Пробивает ли Якарь и Обмотка можВитков и на корпус !
5) Нет Ли Выробатки НА ланэлях Якоря !!
При Наличи Всех Этих Факторов Будет Зарядка Без Вариантов .
а так нужен осцилограф или тестер лин бас шины
сложно или просто это зависит от квалификации. Если вы не знали что такое LIN даже при том что про это написано просто везде и крайне детально то могу предположить что для вас это будет запредельно.
но даже если предположить что вы расшифруете сигнал (хотя он конечно не шифрованный). Дальше что?
например получилось 000101001110101011111010101000 — это хорошо или нет?
чтобы проверить что шина не мертвая и по ней передаются данные достаточно тыкнуться туда осциллографом. Если сигнал хоть какой то есть — то его кто то передает. Как выглядит LIN вы можете
понять правильно ли его передает моторный блок а также протокол обмена вам никто не подскажет потому что сия информация даймлером не публикуется.
Источник
Шина LIN. Сканирование “молчащих” блоков и датчиков
Как было описано в предыдущей статье, в структуре шины LIN есть Master узел и Slave узлы. Master опрашивает узлы Slave, а те ему отвечают. В большинстве случаев если просто подать питание на Slave и посмотреть что происходит на его выходе шины LIN, то мы ничего не увидим, поскольку Slave ожидает запрос или пакет от Master узла.
Master узлом как правило является какой-либо блок управления: Блок управления двигателем, салоном, креслами и т. д. А Slave узлы это различные цифровые датчики, приводы, блоки кнопок управления или джойстики.
Что же делать если стоит задача “оживить” Slave в отрыве от мастера? Например во время проведения ремонта с целью выяснить исправность Slave узла и вообще шины LIN.
Для решения этой задачи удобно использовать LIN адаптер LIN-K совместно с USB-CAN интерфейсом CAN-Hacker. Программное обеспечение нашего анализатора шины LIN позволяет автоматически искать запросы для Slave узлов сети LIN.

Блок управления стеклоподъемниками автомобиля LADA. Slave узел на шине LIN
В качестве примера рассмотрим работу с блоком управления стеклоподъемниками от автомобиля LADA Granta.
Блок управления стеклоподъемнками является Slave узлом в LIN шине автомобиля LADA, а Master узлом является блок управления комфортом, который отправляет запросы на Slave узлы, а те в свою очередь отвечают ему о своем состоянии. В частности блок управления стеклоподъемниками отвечает статусом нажатия кнопок.

Блок комфорта автомобиля LADA. Master на шине LIN
Если соединить эти блоки в сеть и параллельно подключить LIN анализатор LIN-K на скорости 9600 бод и будем нажимать кнопки на блоке стеклоподъемников, то мы увидим следующий обмен с пакетами имеющими >
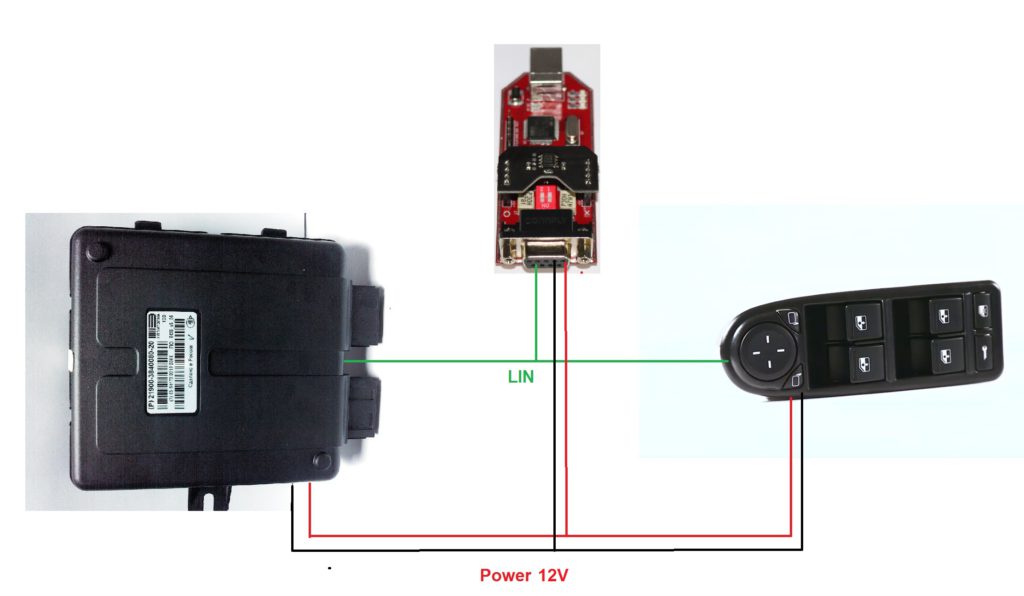
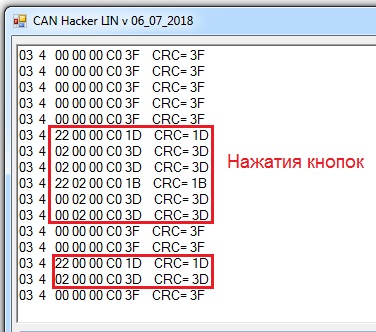
Пакеты с данными: 00 00 00 C0 – говорят о том, что кнопки не нажаты, если же нули меняются на другие числа, например 20 02 00 С0 говорят о нажатии кнопок.
Теперь представим, что мастер узла в лице блока комфорта у нас нет, а запустить Slave – блок стеклоподъемников нужно. Для этого подадим питание на исследуемый блок и LIN адаптер и подключимся к выводу LIN.
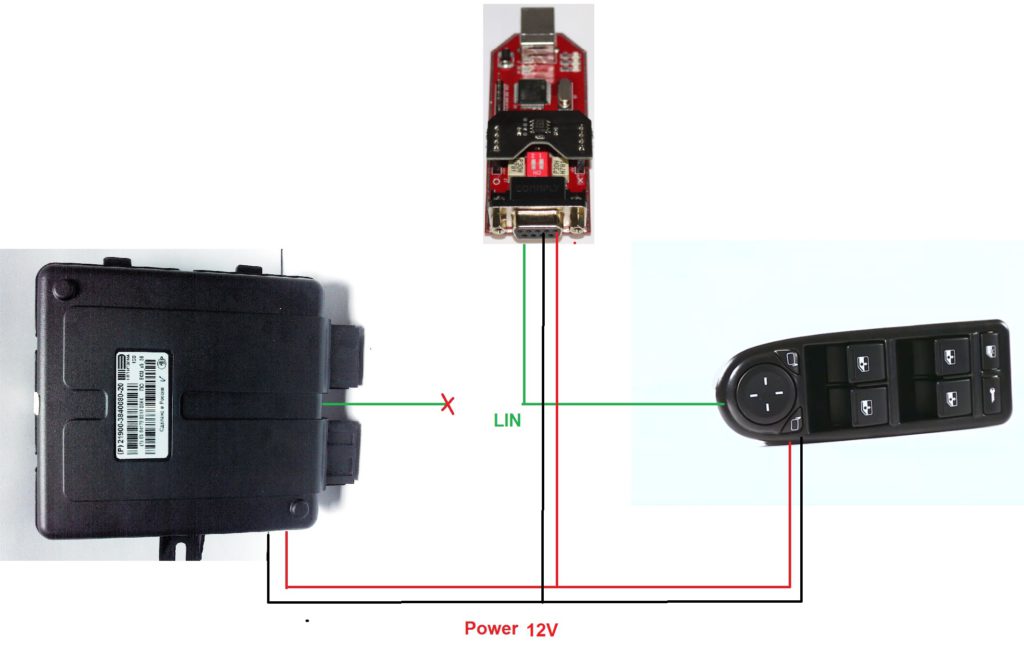
Выберем в программе LIN-K виртуальный COM порт к которому подключен наш LIN адаптер, нажмем Connect. Затем установим скорость LIN 9600 бод и нажмем Open LIN.
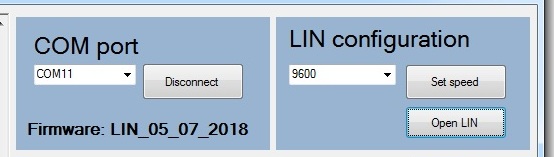
В окне принятых сообщений ничего нет. Это следствие того, что Slave ждет запроса от Master -а.
Настроим LIN-K на передачу запросов в заданном диапазоне – функция Bombing
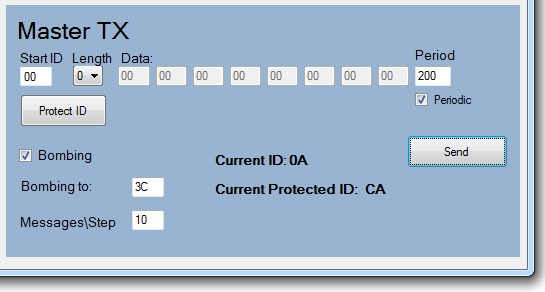
В такой конфигурации LIN-K будет передавать запросы узлу Slave в диапазоне всех возможных ID на шине LIN от 0 до 0x3C. С каждым ID будет передаваться по 10 запросов.
В случае если Slave прореагирует на отправленный запрос мы увидим этот факт в окне приема:
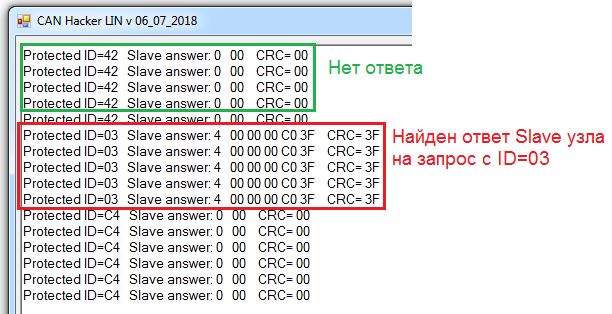
Как видно из скриншота Slave прореагировал на посылаемый ему запрос с >
Следует обратить внимание на то, что в передаваемых LIN анализатором ID автоматически рассчитываются биты защиты и значение ID отличается от значения в счетчике, например по счетчику а передаваемое значение с битами защиты будет равно =0x42
Далее мы можем убрать флаг Bombing и установить значение ID для Master запроса = 03 и мы будем получать ответы от “ожившего” блока кнопок
Источник