
Схемы управления двигателями в функции скорости
 При управлении двигателями в функции скорости контролируется частота вращения ротора двигателя, чтобы в зависимости от ее изменения воздействовать на соответствующие элементы управления.
При управлении двигателями в функции скорости контролируется частота вращения ротора двигателя, чтобы в зависимости от ее изменения воздействовать на соответствующие элементы управления.
В схемах управления пуском двигателя можно использовать реле контроля скорости или небольшие измерительные электрические генераторы. Однако они применяются крайне редко для этих целей из-за сложности конструкции, высокой стоимости и недостаточной надежности. Поэтому частота вращения двигателя контролируется косвенными методами. В асинхронных и синхронных двигателях частота вращения контролируется через ЭДС и частоту тока в роторе, а в двигателях постоянного тока — через ЭДС якоря.
На рис. 1, а и б изображены схемы автоматического пуска двигателя постоянного тока с параллельным возбуждением в функции частоты вращения и в зависимости ЭДС и напряжения якоря от времени пуска. Контроль частоты вращения осуществляют измерением ЭДС двигателя, которая изменяется пропорционально частоте вращения.
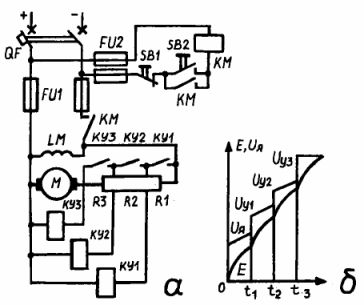
Рис. 1. Схемы управления в функции скорости: а и б — схема и диаграмма пуска двигателя постоянного тока с параллельным возбуждением
Так как ЭДС пропорциональна частоте вращения двигателя, то автоматическое введение отдельных ступеней пускового реостата производится при определенной величине напряжения срабатывания контакторов ускорения КМ1, КМ2 и КМЗ, каждый из которых настроен на определенную величину втягивания. Нажатием пусковой кнопки SB2 включается линейный контактор КМ. Все сопротивления R1, R2, R3 будут включены последовательно с обмоткой якоря и ограничат ток.
При определенной частоте вращения n1 напряжение U у1 на катушке контактора К1 равно

где Се — коэффициент машины.
Когда U у1 будет равно напряжению втягивания, сработает контактор КМ1 и закоротит сопротивление R1. Дальнейшее увеличение частоты вращения до вращения n2 и n3 приведет к возрастанию напряжения на катушках контакторов К2 и КЗ до величин


При этом будут поочередно срабатывать контакторы К2 и КЗ и закорачивать сопротивления R2 и R3. После закорачивания сопротивления R3 закончится процесс пуска и двигатель может длительное время работать.
ЭДС в цепи ротора асинхронного двигателя пропорциональна скольжению, т. е. E2s = E2s. Здесь Е2 — ЭДС неподвижного ротора.
Величина ЭДС тем меньше, чем меньше скольжение, т. е.. чем выше частота вращения ротора двигателя. Для управления пуском двигателей переменного тока с фазным ротором используют реле, контролирующие величину ЭДС в цепи ротора. На эти напряжения настраивают соответствующие аппараты (реле, контакторы), закорачивающие пусковые сопротивления.
Для управления асинхронными двигателями с фазным ротором и синхронными двигателями в функции скорости может использоваться также и частотный метод. Этот метод основан на известной зависимости частоты тока ротора f2 от частоты вращения поля статора n 0 и ротора n 2, т. е.
Так как любой частоте вращения ротора соответствует определенное значение f2, то реле, настроенное на эту частоту и включенное в цепь ротора двигателя, будет воздействовать на цепь катушки контактора. Контактор будет закорачивать ступени сопротивления при заданной частоте вращения.
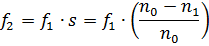
Торможение противовключением двигателей выполняется в функции скорости с использованием реле контроля скорости SR. На рис. 2, а, б показаны примеры торможения асинхронных двигателей противовключением.
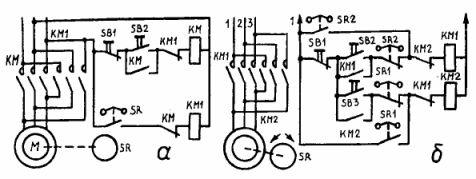
Рис. 2. Схемы торможения асинхронных двигателей противовключением: а — нереверсивного; б — реверсивного
Рассмотрим принципы работы этих схем.
При нажатии на кнопку SB2 включается катушка контактора КМ (см. рис. 2,а), замыкающая силовые контакты и блокирующая кнопку SB2. Одновременно размыкающий блок-контакт КМ в цепи катушки тормозного контактора КМ1 и реле контроля скорости SR отключает их от сети. Когда ротор двигателя разовьет некоторую частоту вращения, контакт SR замкнется, но это уже не вызовет срабатывания контактора КМ1. Двигатель продолжает нормально работать.
Останов двигателя с торможением противовключением выполняется нажатием кнопки SB. При этом обесточивается катушка контактора КМ, а его главные контакты отпадают и отключают двигатель от сети. Размыкающий контакт КМ в цепи катушки тормозного контактора КМ1 замкнется. Так как в этот момент контакт реле контроля скорости SR замкнут, то немедленно включаются главные контакты тормозного контактора, и обмотка статора переключается на реверсирование, магнитное поле начнет вращаться в обратном направлении, т. е. навстречу вращению ротора, и произойдет торможение двигателя противовключением. Частота вращения ротора уменьшается и при определенной малой величине ее контакты реле контроля скорости РКС разомкнутся и отключат двигатель от сети.
При реверсивном управлении с торможением противовключением (рис. 2,б) пуск двигателя вперед выполняется нажатием кнопки SB1, которая, замыкая цепь катушки контактора КМ1, обеспечивает включение двигателя в сеть. Ротор двигателя начнет вращаться и при достижении им определенной частоты вращения, замыкающий контакт SR1 реле контроля скорости замкнется, а размыкающий контакт SR2 разомкнётся.
Однако включение катушки контактора КМ2 не произойдет, так как размыкающий контакт контактора КМ1 разорвал ее цепь. В таком положении двигатель будет продолжать работать, пока не нажмут кнопку SB. При нажатии на кнопку SB обесточивают цепь катушки КМ1. При этом замкнется размыкающий контакт КМ1, и цепь катушки контактора КМ2 получит электропитание.
Обмотка статора двигателя включится на реверсирование. Так как ротор по инерции продолжает вращаться в прежнем направлении, происходит торможение противовключением. При уменьшении частоты вращения до определенной малой величины реле контроля скорости размыкает свой контакт SR1, контактор КМ2 обесточится и отключит двигатель от сети.
Для того чтобы произвести пуск двигателя в обратном направлении, нажимают на кнопку SB2. Весь процесс будет аналогичен описанному. Теперь роль тормозного контактора выполняет контактор КМ1, а управлять процессом торможения будут контакты SR2 реле контроля скорости.
Автоматизированный пуск синхронного двигателя связан с известными трудностями, так как при этом надо не только ограничить пусковой ток, но и осуществить синхронизацию машины с сетью.
Схема управления синхронным двигателем небольшой мощности показана на рис. 3. Ограничение величины пускового тока обеспечивается при помощи активных сопротивлений, включенных в обмотку статора. Перед пуском двигателя включают автоматические вводные выключатели QF и QF1 сетей переменного и постоянного тока, которые обеспечивают максимальную и тепловую защиту. Нажатием пусковой кнопки SB2 включают катушку контактора КМ, и обмотка статора синхронного двигателя через главные контакты КМ присоединяется к сети через пусковые сопротивления Rn. Катушка самоблокируется, и ее контакт в цепи постоянного тока включает блокировочное реле KV, замыкающий контакт которого, замыкаясь, подготавливает катушки контакторов К1 и К2 к включению.
Реле частоты KF1 и KF2, входящие в цепь возбуждения ротора LM, действуют в зависимости от частоты вращения двигателя. При пуске, когда скольжение ротора наибольшее, размыкающие контакты реле KF1 и KF2 размыкаются. Размыкание катушек происходит раньше, чем включится блокировочное реле KV, и катушка К1 питания не получит. Повторно контакты реле KF1 и KF2 замкнутся тогда, когда частота вращения двигателя достигнет примерно 60—95 % синхронной в соответствии с регулированием реле.
После замыкания контактов реле KF1 включится катушка контактора К1, ее контакты в главной цепи закоротят пусковые резисторы Rп, и статор окажется включенным на полное напряжение сети. При замыкании размыкающихся контактов реле KF2 создается цепь для питания катушки контактора К2, независимая от контактора К1, его контакт размыкается при частоте вращения, равной примерно 60 % синхронной.
Контактор К2 имеет две катушки: одну основную, втягивающую КМ1 и вторую катушку КМ2, предназначенную для освобождения защелки, которой снабжен контактор. После включения втягивающей катушки КМ1 замыкающие контакты К2 замыкаются в цепи возбуждения, а размыкающие контакты К2 размыкаются, отключая обмотку ротора от разрядных резисторов R1 и R2 и присоединяя ротор к сети постоянного тока.
Рис. 3. Схема управления синхронным двигателем
Контакты контактора К2 работают в следующем порядке. Размыкающий контакт К2 размыкается в цепи питания втягивающей катушки, но благодаря наличию защелки контактор остается включенным. Замыкающие контакты К2 замыкаются в цепи питания обеих катушек и в цепи катушки КМ2, подготавливая цепь к последующему включению. Катушка К2 обесточится как только механизм защелки будет освобожден катушкой КМ2. Двигатель отключается от сети нажатием кнопки SB1. Катушка К1 отпускает свой размыкающий контакт в цепи катушки КМ2, которая освобождает защелку и отключает катушку КМ1, после чего схема приходит в исходное положение.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Онлайн журнал электрика
Статьи по электроремонту и электромонтажу
Реле контроля скорости вращения электродвигателя РКС
 Информация о скорости вращения электродвигателей может быть получена от разных датчиков скорости, также и от самого мотора. Скорость движков неизменного и переменного тока определяет величину их ЭДС. Таким макаром, если определять величину ЭДС, то тем будет получена информация о величине скорости.
Информация о скорости вращения электродвигателей может быть получена от разных датчиков скорости, также и от самого мотора. Скорость движков неизменного и переменного тока определяет величину их ЭДС. Таким макаром, если определять величину ЭДС, то тем будет получена информация о величине скорости.
Электромеханическое реле контроля скорости (РКС)
Электромеханическое реле контроля скорости (РКС) работает по принципу асинхронного мотора. Ротор реле представляет собой неизменный магнит
1, соединенный с валом мотора, скорость которого измеряется. Неизменный магнит помещен снутри дюралевого цилиндра 5, имеющего обмотку в виде беличьей клеточки. Цилиндр может поворачиваться вокруг оси на маленький угол и переключать при всем этом при помощи упора 3 контакты 4 (6).

При недвижном движке упор занимает среднее положение и контакты реле находятся в «нормальном» положении. При вращении мотора и тем магнита
1 уже при маленьких скоростях на цилиндр 5 начинает действовать крутящий момент, под воздействием которого он поворачивается и обеспечивает при помощи упора 3 переключение контактов 4.
При скорости мотора, близкой нулю, цилиндр ворачивается в среднее положение и контакты 4 перебегают в свое «нормальное» состояние. Величина скорости, при которой переключаются контакты реле, определяется положением настроечных винтов 2.
Реле контроля скорости комфортно использовать при автоматизации процесса
торможения, когда требуется обеспечивать отключение мотора от сети после
понижения его скорости до нуля, потому реле контроля скорости очень нередко
употребляются в схемах автоматического торможения трёхфазных асинхронных движков с короткозамкнутым ротором способом противовключения.
Технические свойства реле контроля скорости РКС
Номинальный ток контактов — 2,5 А. Номинальное напряжение переменного тока на контактах
— 500 В. Частота вращения реле наибольшая — 3 000 об/мин.
Количество и род контактов — 2 переключающих
Источник
Приборы контроля скорости вращения – реле контроля скорости
4. Приборы контроля скорости вращения – реле контроля скорости
В системах автоматизации технологических процессов часто возникает необходимость иметь точную скорость (число оборотов) вращения исполнительного механизма. С этой целью созданы и успешно эксплуатируются в производственных условиях приборы контроля скорости вращения – реле контроля скорости (РКС).
Эти приборы являются датчиками, которые дают импульс в том случае, когда скорость движения соответствующего исполнительного механизма будет выше или ниже заданного значения. Для этой цели обычно применяют датчики электрического типа. Эти датчики в зависимости от принципа действия могут быть индуктивными, центробежными или типа тахогенератора.
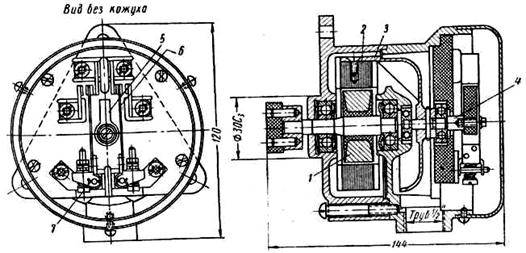
Рис.10. Скоростной индуктивный датчик типа РКС
Скоростной индуктивный датчик типа РКС (рис.10) выполнен с жестко укрепленным на валике датчика постоянным магнитом 1. Кольцо 2 с обмоткой на внутренней стороне охватывает магнит и при его вращении в обмотке катушки появляется ток, а кольцо, закрепленное на кронштейне 3, поворачивается в сторону вращения магнита. На другом конце вала 4 укреплена колодка 5, которая при повороте размыкает нормально замкнутые (НЗ) и замыкает нормально открытые (НО) контакты 6. Поворот колодки зависит от скорости вращения магнита 1, чем выше эта скорость, тем больше угол поворота колодки Настройка реле контроля скорости на требуемое по технологическому процессу число оборотов, а также переключение контактов осуществляется регулировочными винтами 7. Этот датчик устойчиво работает в пределах 930—3000 мин-1, при меньших числах оборотов датчик недостаточно чувствителен.
Скоростной центробежный датчик основан на действии центробежной силы, которая при увеличении числа оборотов раздвигает шарнирно подвешенные к вращающейся вертикальной оси грузы. Эти грузы при определенном числе оборотов замыкают или размыкают соответствующие контакты электрической цепи управления.
5. Промежуточные звенья схемы электроавтоматики
К промежуточным звеньям, преобразующим сигналы датчиков, относятся промежуточные реле, реле пуска и защиты электродвигателей при перегрузке, счетчики импульсов и др., а также вычислительные, сравнивающие и измерительные устройства.
Промежуточное реле используют в разных случаях, например для размножения контактов в дополнение к путевому переключателю, когда у последнего не хватает их для посылки командных сигналов; усиления командных сигналов включением цепи питания током более высокого напряжения; постановки какого-либо прибора, в том числе и самого реле на самопитание — как запоминающее устройство и т. п.
Реле в общем случае состоит из катушки, внутри которой расположен стальной сердечник. Торец катушки находится на одном уровне с торцом стального сердечника, под которым расположен и шарнирно закреплен якорь, способный легко поворачиваться в сторону сердечника. Свободным концом якорь контактирует с жесткими пружинными лепестками, несущими контакты, которые в свою очередь контактируют с контактами на неподвижном жестком пружинном лепестке. Лепесток представляет собой плоскую пружину, обеспечивающую плотное прилегание контактов и осуществляющую компенсацию хода якоря при воздействии последнего на лепесток.
Реле работает следующим образом. Электрический ток поступает на обмотку катушки и намагничивает стальной сердечник. Под воздействием созданного магнитного поля якорь притягивается к сердечнику и одновременно воздействует на пружинный лепесток с контактами. Если качающийся лепесток заключен между двух статических лепестков, каждый из которых имеет свои контакты, то при работе (качании) подвижного лепестка одни контакты будут размыкаться, а другие замыкаться. Увеличивая количество подвижных и неподвижных лепестков, электрически изолированных друг от друга, создается возможность размножения полученного сигнала от контролирующего элемента схемы электроавтоматики.
Для обеспечения питания элементов электросхемы электрическим напряжением применяются блоки питания типа БПТ – 11; БПТ – 11/12 и БПТ – 1002, работающие на тиристорах и выполняющие функции стабилизатора напряжения, понижение напряжения до требуемого уровня, необходимого по условиям работы схемы электроавтоматики, и если есть необходимость – преобразование переменного тока в постоянный.
В схемах электроавтоматики применяются промежуточные реле типа РП – 23; 25; 250; 321; РП – 8; 9; РП – 16-5; РП – 16 -1М/7М; промежуточные реле постоянного тока типа РПУ – 3М – 114; 116; 112Т и др., а также дифференциальные реле, размножающие и преобразующие сигнал типа РНТ565; 566; 566/2; 567/2 и ДЭТ – 11; 11/2; 11/3; 11/4; 11/5, а также реле повторного включения РПВ – 01; 02.
Для защиты электродвигателей от перегрузки применяются реле максимального тока, реагирующие на повышение в цепи питания тока выше установленного допускаемого номинала. С этой целью используются реле максимального тока типа РСТ – 11; 13; РСТ – 11М; РСТ – 15; 23, но наибольшее расспрос ранение получили для защиты электродвигателя от перегрузок реле электротепловые токовые типа ТРТ – 110; 120; 130; 140; 150 и ТРТП – 110; 120; 130; 140; 150
Запуск в работу электродвигателя рабочей машины в системе автоматизации технологических процессов производится с помощью реле – пускателей нереверсивных типа РЭВ – 1224; 1314; 1404 – питание постоянным током, РЭВ – 2224; 2313 – питание переменным током, а реле – пускатели РЭВ – 2318 и РЭВ – 2408 дополнительно снабжены тепловым реле. Кроме указанных выше типов используются реле – пускатели типов РЭП – 15П – 0102;. – 0202; −0304; − 0404.
Для визуального показания наличия или отсутствия того или иного сигнала и его использования в электросхемах автоматизации применяют реле – указатели типа РУ – 21 (переменного тока), РУ – 21 (постоянного тока), РУ – 21 – 1 (постоянного тока). Все используемые реле имеют очень малое время срабатывания, равное 0,1 … 0,2 с, что практически можно считать мгновенным; частота срабатывания реле доходит до 2000 Гц. Такая частота срабатывания в схемах автоматизации технологических процессов в термических, кузнечно – прессовых и литейных цехах недоиспользуется, т. к. процессы движений рабочих органов, выдержки времени на период совершения технологической операции и т. п. операции совершаются за время, значительно большее, чем частота срабатывания реле. Этот фактор в свою очередь приводит к увеличению срока службы самого реле.
В схемах автоматизации технологических процессов получили распространение реле типа ЭП (рис.11), используемые как командоаппарат. Стойки с неподвижными контактами прикреплены винтами к основанию из карболита. Контактные мостики с контактами перемещаются с карболитовым штифтом. Через систему рычагов штифт связан с небольшим электромагнитом, который поднимает его вместе с подвижными контактами вверх при подаче тока в катушку магнита, замыкая НО контакты или размыкая НЗ контакты, при ртом происходит переключение цепей управления. При отключении тока штифт с подвижными контактами, под действием силы тяжести, опускается в нижнее положение. Реле многоконтактное. В системах автоматического управления встречаются также и телефонные электромагнитные реле типа РМ. Потребляемая мощность телефонного реле в 10—12 раз меньше мощности управляемой сети. Такое реле может без обгорания контактов разорвать цепь мощностью до 60 вт. Ток срабатывания около 0,001а.
В системах автоматического управления распространены различные электромагнитные муфты, включение и выключение которых осуществляется от командных сигналов датчиков.
В качестве электрических средств управления, применяемых как приводы исполнительных органов, можно назвать лишь два — электродвигатели и электромагниты. На автоматических линиях используют электродвигатели переменного тока. Электродвигатели постоянного тока применяют обычно в тех случаях, когда необходимо регулировать число оборотов.
В качестве привода для небольших поступательных перемещений элементов механизмов автоматического управления используют электромагниты, например для перемещения гидравлических и пневматических золотников, включения тормозов и муфт. Обычно принимают электромагниты переменного тока, которые изготовляют как с толкающим, так и с тянущим якорем для ходов от 10 До 15 мм и с тяговым усилием от 1 до 25 кГ.
Источник